 +7 (812) 4-673-673
+7 (812) 4-673-673
R.O.V. OBSERVER 3.2
R.O.V. OBSERVER 3.2
To order
Call our sales manager
Documentation
Буклет Observer 3.2
Буклет Observer 3.1
Буклет Observer 3.1

Marine underwater robot observer mini-ROV OBSERVER 3.2 is used for underwater exploration to a depth of 150 m. To move with speed up to 3 knots. OBSERVER 3.2 has two built-in batteries, through which can operate autonomously from 3 to 4 hours. In the standard version, it is equipped with two high-resolution cameras, high sensitivity, and may bear, in addition, various sensors such as sonar, a manipulator, a pressure gauge, etc.
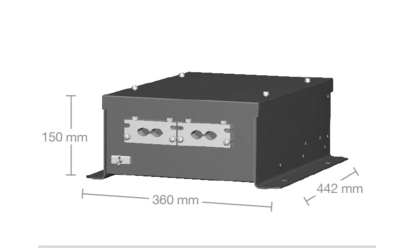
OBSERVER 3.2 consists of four separate blocks, placed in a waterproof transport case: the submersible cable (cable), the control unit and the transformer.
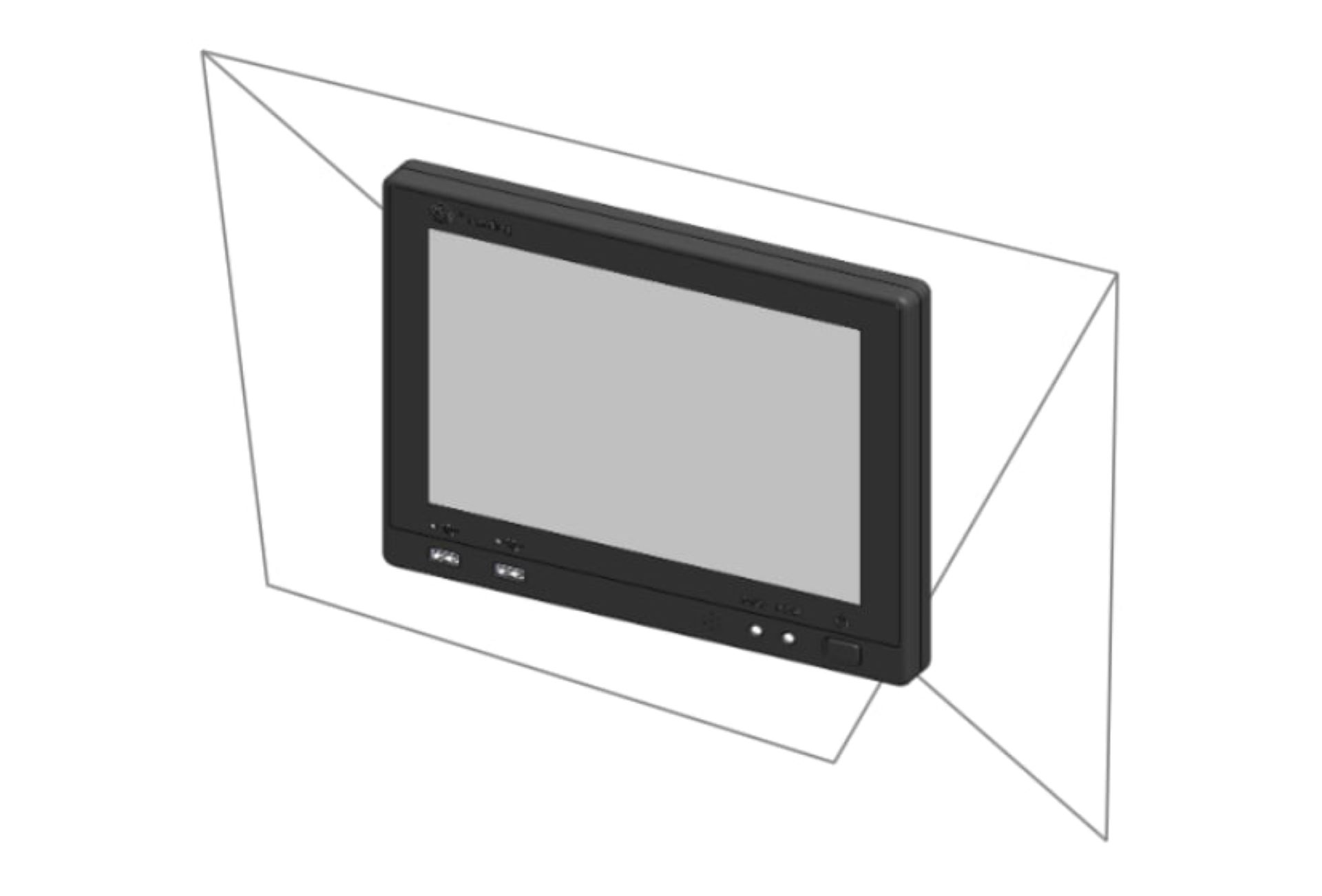
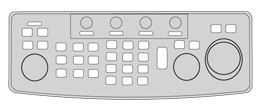
The control panel is placed in a waterproof case and includes a handy 8 'LCD display, built-in digital recorder, 2 video outputs (with an external monitor or VCR), joysticks to control underwater vehicle and cameras (pan and tilt) and a comfortable keyboard to control the system .
Specifications OBSERVER 3.2:
- Maximum depth: 150 m
- Dimensions: 490 mm x 270 mm x 210 mm.
- Weight: 6.5 kg
- The maximum speed of 3.5 knots.
- Power Specifications: 3 Engine: 2 longitudinal (front / rear), 1 vertical (up / down).
- Propellers 3 x 3 blade nozzle.
- Battery: Rechargeable Ni-MH, 3:00 (machine + console).
- Power: 110 - 220 V - allows you to work with remote control and battery charging at the same time (3 to 4 hours of battery life on board battery)
Optional functions:
- USBL acoustic positioning
- 2 functions manipulator
- digital Thickness Gauge
- Laser Pointer
- wire control
- Salinity / pH probe
- Amplification Video
Analogues
-

Box for connecting the NAW-60 JQD-69B / C / J
-
Boardeq BDP 10 terminal NBDP
-
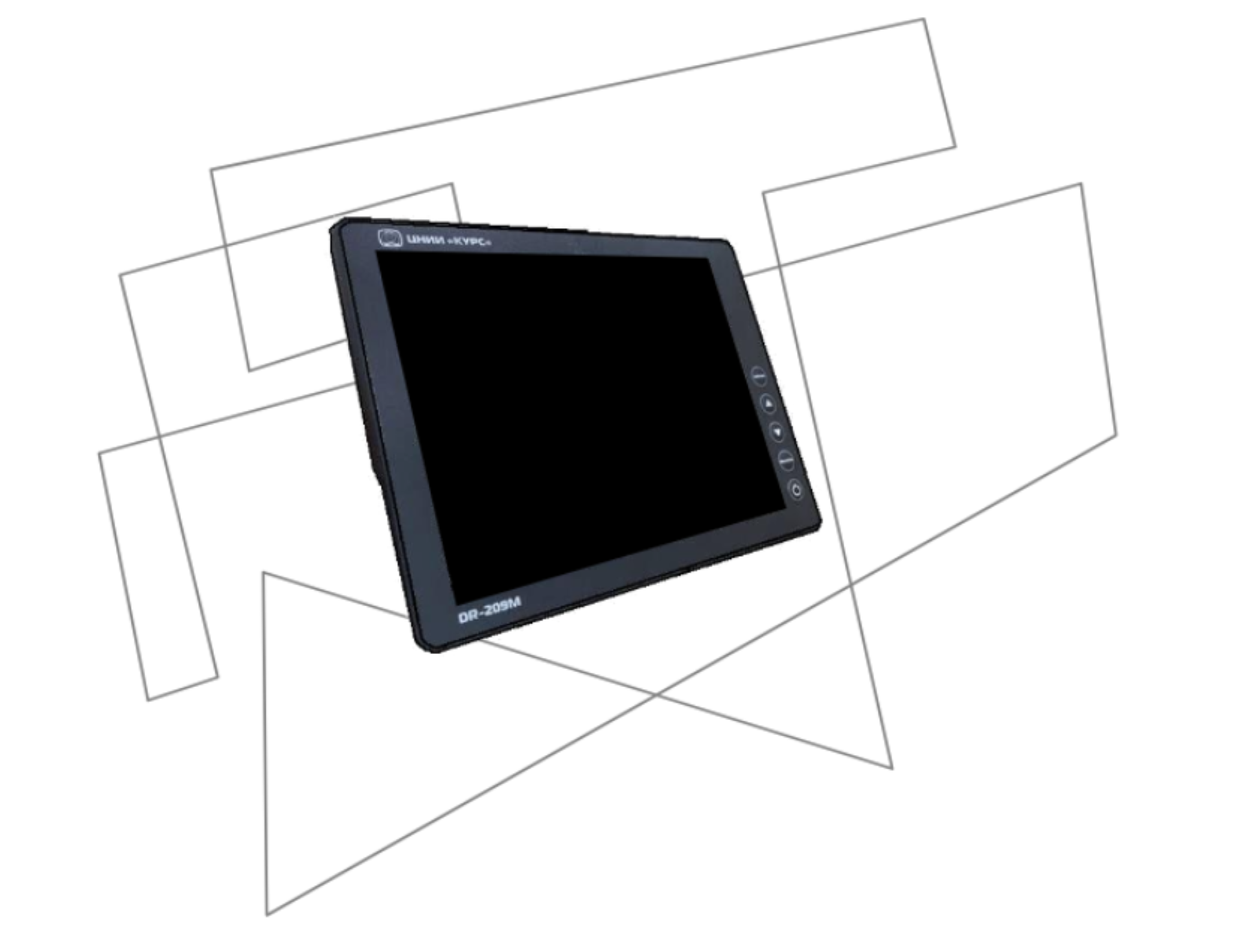
Universal rotation speed meter DR-209M9
-

Connector S-31-149618- A Cobham
-

Male Mini NMEA2K Field Connector 31-149684-A Cobham
-

NSR NPT-100
-

PK2
-

PKC1
-

Microphone Jotron SR8201
-

Scanner 25 kW JMA-5222-7, antenna 7' 24 rpm
-

Station for connecting 2nd keyboard NCE-7729A
-

ARPA board for radar type Atlas 1002P SAM Electroanics
-
NCE-5171-E (2nd Keyboard Station)
-

Block NCT-59A (GYRO SYNCRO INTERFACE)
-

Furuno IF-8900 junction box
-
NQE-3141-4A Antenna switch (Max. 4 radars)
-

Satellite Beacon LookOut
-

SAILOR 3027 GMDSS Terminal
-

HLD-ULD601 hydroacoustic transducer
-

Novega PT9 Ninety hydroacoustic transducer for VDR