 +7 (812) 4-673-673
+7 (812) 4-673-673
Satellite navigation systems: sources of error
Satellite navigation systems: sources of error
A GNSS receiver usually delivers a position with a nominal error of less than 15 meters at the 95% confidence interval. A number of sources of error affects the result.
1. Atmospheric effects
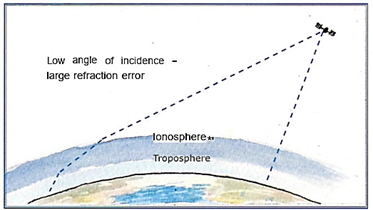
The satellite signal, which is weak, is affected during its passage through the ionosphere and the troposphere. This distortion is greatest for signals from satellites near the horizon.
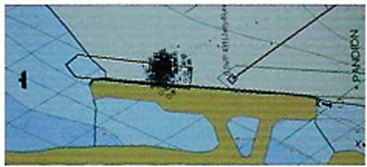
GPS plots for a moored vessel, showing a spread of about +/- 15 meters for a series of past positions. (Track or Traif-function.) Photo A Knutas
The troposphere error is caused by the atmospheric layer closest to the earth and extending to about 10 km height. This is where "the weather" takes place. Nitrogen, oxygen and water vapour are gases which can all distort the signal. These errors are reduced by compensatory calculations based on a mathematical model of the troposphere.
The signal passage through the ionosphere, which is the layer from 50 to 1000 km, introduces other errors. In this case the signal is affected by the presence of electrically charged particles, resulting in a timing error. To limit the size of this error a so-called elevation mask, set to 10° - 15°, filters out signals from satellites close to the horizon. Military receivers can reduced the size of this effect by using several frequencies to measure and model the ionosphere. Civilian receivers will be able to use an addition frequency, L5, when this is introduced, and will then be able to use several frequencies for the measurement.
2. Clock error
A clock error occurs when the satel lite and receiver clocks are not per fectly synchronised. As the satellite is equipped with several very exact atomic clocks, this error is primarily caused by the receiver clock. Most of this error can be eliminated by locking on to at least four different satellites.
3. Ephemeris error
The monitoring stations that are spread around the equator continually register the satellite signals in order to calculate their orbits. The orbital data is sent to the users as part of the navigational message which includes orbital parameters, that is to say, information on the positions of the satellites. The error in this source is called orbital path errors and contributes 3-5 meters to the total error.
4. Multipath error
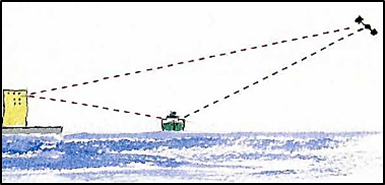
If the satellite signals should be reflected from surfaces, such as water, walls or surfaces on board, such as chimneys, before reaching the receiver, then so-called "multipath errors" are generated.
Increasing the elevation mask, i.e. cutting off signals from satellites close to the horizon, to > 15° will decrease the size of multipath errors.
Geometry and availability of satellites
Positional accuracy is decreased when position lines intersect at unfavourable angles. Because the Satellite receiver does not present any position lines, the instrument displays a so-called DOP (Dilution of Precision) value. This is a measure of how well the position lines from the satellites intersect. A good distribution of satellites across the heavens gives a good geometry favours an accurate position plot.
Nautical navigators are most interested in the HDOP (Horizontal DOP). Other parameters include: PDOP (Position DOP), which is the error in the three-dimensional position and GDOP (Geometric DOP), which contains the PDOP and the clock error. The actual error of the system multiplied by the HDOP generates the value of the positional error. HDOP should be less than 4. When booting, HDOP is initially large and decreases as the position is calculated using more and more satellites. Quite big variations can occur on occasion but these are generally short-lived.

A page in the plotter which shows the number and positions of the satellites. In this case only five are available and three of them are near each other. This generates a poor intersection between the position lines. (Az = Bearing)
When as in this case only a few satellites are accessed and some of these are relatively close to each other, then the HDGP can be unusually large. If the refractive error in the atmosphere, together with other errors, is +/- 15 meters then the total error will be 15 x 16 = +/- 240 meters.
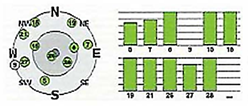 Elevations and bearings in a polar diagram, signal strengths as a bar diagram
Elevations and bearings in a polar diagram, signal strengths as a bar diagram
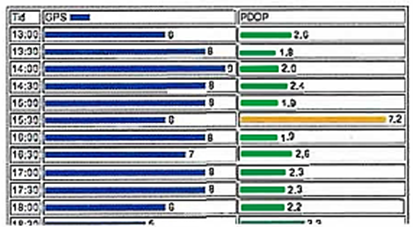
PDOP information from an official website. This shows that PDOP can both vary a good deal and quickly. PDOP is a description of the quality of a 3-D position. The Navigator is most interested in HDOP, which is somewhat smaller than PDOP
6. GPS blackout
Solar flares are cooler areas which appear darker on the sun. They are attributed to an uneven distribution of the sun's magnetic field. They have a periodicity of about 11 years, with the most recent maximum in 2012/13. Processes in the sun have an effect on the earth's ionosphere and thus an effect on the propagation of radio waves.
On the sunny side of the earth, sunspot effects blocked GPS receivers from receiving satellite signals on the 5th and 6th December, 2006.
7. Interference
Satellite receivers have to be extremely sensitive in order to collect the very weak signals from satellites. One result is that other sources of electromagnetic radiation can interfere with the genuine signals. Detecting and following the satellites can then be difficult or even impossible.
Some of the natural sources of interference are the solar wind, magnetic storms, e.g. the Northern Lights, the radiation field surrounding the Earth and meteorological conditions at the receiver. Physical structures between the satellite and receiver can also interfere with reception. The high sensitivity of the receivers unfortunately also makes them sensitive to these sources of error.
In 2001 GPS receivers in the harbour of Moss Landing in Monterey Bay experienced interference in an area of about 1000 meters diameter. After an intensive search the interference was located to a pre-amplifier on a TV antenna on a boat.
8. Jamming and spoofing
Portable transmitters are available that intentionally block, jam or interfere GNSS signals (jamming). This kind of equipment has been tested during military manoeuvres. Although technically more difficult, it is possible to deceive a GNSS receiver by generating false signals (spoofing).
9. Receiver errors
Depending on its quality, internal interference in the receiver (software and clock errors) can result in errors of 2 meters or more.
10. Inadequate signals
The GPS receiver needs a free line of sight to the satellites. High buildings and dense vegetation can interfere sufficiently with the satellite signals so that a position cannot be calculated. This influence is strongly affected by the direction in which these hindrances are situated. Obstructions to the south are worst because GPS satellites pass a maximum latitude of 55°. This limits the number of satellites in northern latitudes.
11. Reliability
There are a number of factors that influence the accuracy and reliability that one may expect to achieve on board. The specification for accessibility (Service Reliability) is specified to 99.996 %.
RAIM (Receiver Autonomous Integrity Monitoring) is a function in some receivers which will sound an alarm when the reliability of the system is bad. The func tion checks the signals from the various satellites and recognises when one of them gives an unexpected position. If this is the case then that satellite is removed from the calculation. The function needs at least five satellites in order to discover an error. If six satellites are available then the function can isolate a bad signal.
The reliability of a system on a vessel depends on how the installation and maintenance has been carried out, including upgrades!
 Older receivers have lower performance
Older receivers have lower performance
Иностранный язык: en