+7 (812) 4-673-673
+7 (812) 4-673-673
Nautical information
Navigation starts with a Passage Plan from berth to berth. The planned route is plotted on the chart or electronic chart of the navigation system.
The route is laid out paying due attention to draught and height of the vessel, safety margins to dangers and various other factors that may concern the crew, the cargo, traffic regulations, separation schemes and other nautical information.
For navigation one wants to have:
Nautical information
About the seas to be crossed. This is normally available on the chart or electronic chart, with additional information from sailing directions, tidal information, weather forecasts and other sources, e.g. those concerning regulations. All nautical information must be kept up-to-date by corrections
Navigational information
About the voyage, "here and now". This is the result of measurements and observations made by the navigator: position, course, course deviations, speed, depth, safety margins, etc.
Положение судна может быть определено одним из двух разных способов. Первый это непосредственное определение или измерение координат судна, визуально или с помощью инструментов. Вторым способом является вычисление поправок к известным координатам.
1.1. Line of positionA Line of position, LOP (or Position line, PL,) is a line on the chart along which the ship is positioned. A LOP is the result of an observation.
|
The pilot comes on board with*further information about local waters. Photo: Swedish Maritime Administration |
A simple and reliable way to locate the location is the transfer method. When the navigator observes two objects on the same line, and these objects are marked on the map, then the ship is positioned somewhere along the projected line on the map connecting the position line objects. The position of the vessel is determined at the intersection of at least two lines of position determined simultaneously |
1.2. Positioning
A "fix" is the result of at least two measurements/observations on the earth'sSurface, made at the same time, which are subsequently plotted onto the chart.
Four principles of observation can be used for determining positions.
- distance/range (distance is most used as "distance travelled" while range is usually used fore shorter measures, from a headland etc.)
- bearing (direction as given by the compass)
- difference of bearings
- difference of distance/range (in very little use today (2016) by civil navigators, systems only in China and Russia).
1.3. Distance/Range
Distance, can be estimated visually or can be measured, in particular using radar. Distance measurements give a circular LOP.
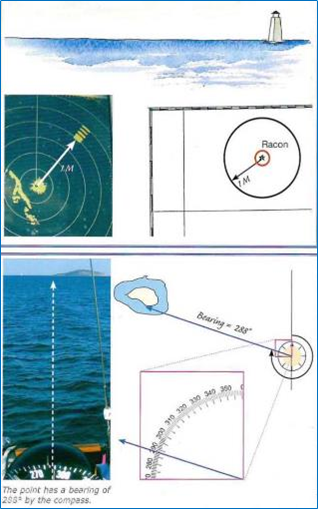
When the distance to an object is measured, for example by radar, the LOP wiii be given by a circle on the chart with the object at its centre. A so-called P.acon gives a signal in Morse code on the radar screen.
A bearing is a direction with north as reference and expressed in degrees. There are 360° in a circle, increasing in the clockwise direction, so north = 0° and 360°. A bearing is measured with a compass or by radar and is plotted on the chart with a straight line. A single LOP cannot provide a position but, for example, two simultaneous bearings that intersect give a position. 3 position lines are needed for a good fix.
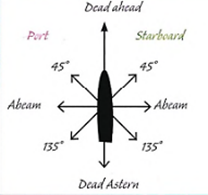
The term relative bearing is used on board to describe direction in relation to the fore-and-aft axis of the vessel. It is used, for example, for communication between look-out and navigator. Older terms for 45° is "on the bow" and for 135° "On the quarter" ( port or starboard, as the case may be).
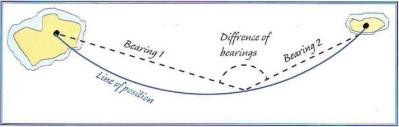
1.5. Horizontal angle (Difference of bearings)
This is the Angle between two objects. The LOP will be a circle through the two objects. This method is uncommon today but was used a great deal for hydrographic work in earlier times.
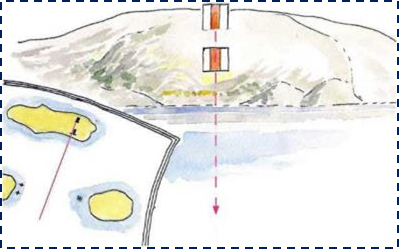
The most common situations for difference of bearings is a transit = difference is zero. The LOP for the transit is a straight line on the chart.
 Two navigational marks in line and their chart symbols
Two navigational marks in line and their chart symbols
An angular measurement between two objects gives an arc of a circle as a LOP
 д
д
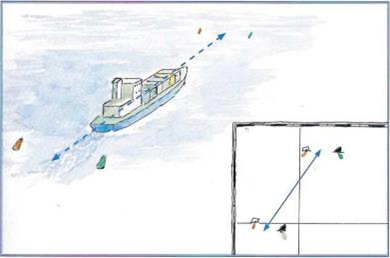
When the Navigator can observe two objects/points with a difference of bearing of 180°, the LOP is the line connecting the two objects.
The vessel can be used as a sight. Normally there will be objects parallel with the foreand-aft axis of the vessel that can be used as sights.
1.6. Depth measurement
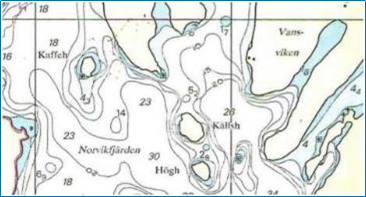
Depth measurement, with an echo-sounder, will give an indication of the actual depth of water under the tranducer. Depending on the topography of the bottom, it may be possible to draw a useful conclusion about ones position.
|
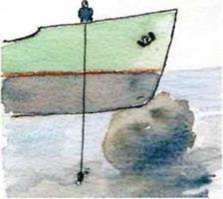
Although nobody today uses a hand lead for navigation it can be useful to investigate the bottom after running aground |
Depths and depth contours on the char |
1.7. Positional accuracy
An observed position (a fix) is marked on the chart at the intersection of at least two LOPs, observed at the same time.The degree of accuracy required of the position depends on the ships position and surroundings.
On the open ocean navigational considerations do not demand a high degree of accuracy. A circle of several miles radius may be quite adequate. Instead aspects of the weather and fuel economy dominate. In coastal waters the proximity to dangers demands higher positional accuracy.
The position is conventionally marked with a circle whose size reflects the accuracy of the observations. In restricted waters such as archipelagos, rivers and in ports the need for accuracy is high. But the position doesn't always have to be marked by a point. Depending on the situation a line, such as a transit, a sector or simply knowing that one is outside a "No Go" area can be adequate.
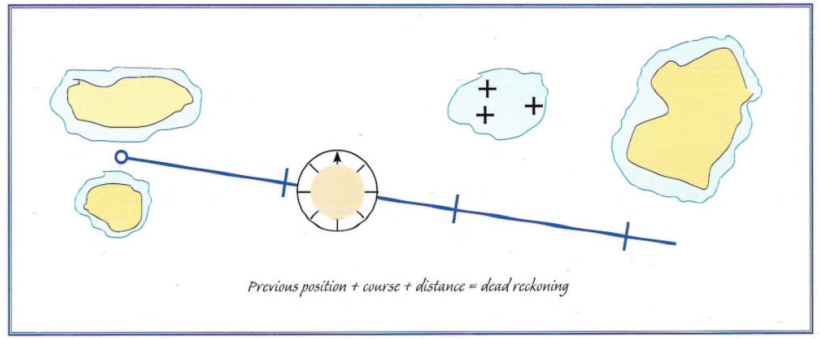
1.8. Calculated positions
Calculating a new position from a known position by plotting the average course (direction travelled) according to the compass and distance run on the log (distance travelled) is called dead reckoning (DR). An estimated position (EP) is a DR position which has been adjusted for leeway and tidal set and drift