 +7 (812) 4-673-673
+7 (812) 4-673-673
Echo sounder

The handlead is a wieght at the end of a rope. The rope is marked, usually in two meters interval. (white=2m, blue=4m, red=6m, leather=8m, a string with one knot=10m)Untill 1930th this typ of lead was used for hydrograph survey. Today it may be used for inspection of depth around a ship that has went aground.
Echo sounder
The echo sounder is a useful navigational aid. It transmits pulses of ultrasound (>20000 Hz) and measures the period that elapses before the echo from the sea floor is registered by the sensor. The speed of sound in water varies with the salinity, temperature and depth but echo sounders for navigation are usually calibrated to 1500 m/sec. The resulting depth measurement can be displayed digitally or on a screen as a sea floor profile. This was printed on paper by older echo sounders but today the result is displayed on a screen, with the option of printing it out. There are three types of echo sounder sensors: magnetostrictive, electrostrictive and piezoelectric. Common to all three is that a material that is in contact with the water is made to vibrate by passing an alternating current through the material. The vibrations create sound waves that are reflected by the sea floor. When the reflected energy returns to the sensor the opposite process occurs - the vibrations create a pulse of current which is sent to the processor of the echo sounder and the time of flight measured.
The pulse length and interval is changed automatically depending on the depth scale chosen. Greater depths require more energy and a longer time of flight.
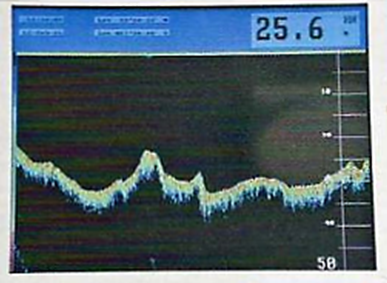

Echo sounders showing both the actual depth digitally and a sea floor profile
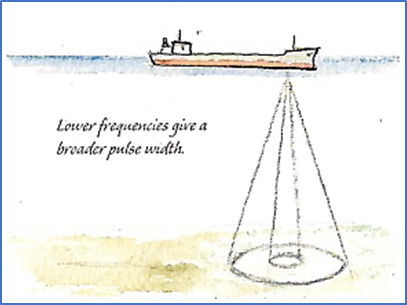
The cone-shaped transmission wave (pulse width) usually has a subtended angle of 15° - 25°. Frequency, sensor size and pulse width influence each other, which require scompromises.
In addition the echo sounder can display:
- A depth trend indicator; shown as an upright or inverted arrowhead.
- The observed maximum and minimum depths.
In as practical an independent navigation instrument the echothat sounder is capable can be of considered confirming - or challenging - a position that has been determined by another instrument.
- Different units for depth: feet, fathoms or meters.
- Alarm for shallow water or for exceeded greatest depth.
- Damping of the digital display
- Choice of depth reference plane: depth below keel, depth below sensor or depth from sea level.
- The pulse length and gain (amplification) can be adjusted on some echo sounders
 Digital echo sounder with Shallow (5HA = least depth) alarm activated
Digital echo sounder with Shallow (5HA = least depth) alarm activated Sources of error
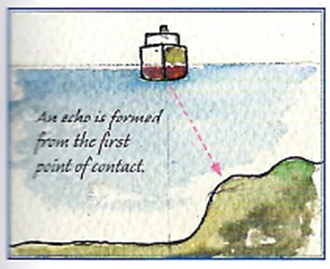
As the sound pulse describes a cone shape, the first registered echo does not always come from directly beneath the vessel.
The variation in the speed of sound that can occur is not a problem for navigation but in surveys a correction factor is generally applied.
Errors can include effects of layers with different temperatures and salinities or the effect of weed growth on the bottom, wnich causes a too shallow reading.
The siting of the sensor can affect the echo sounding function. Air bubbles will reflect some of the energy from the sensor. Bubbles may originate from the bow wave or from irregularities in the hull.

Digital echo sounders are programmed to show "correct" echoes, not schools of fish or layers of water.
IMO accuracy demands for echo sounders:
Based on a sound speed in water of 1500 metres per second, the allowable tolerance on the indicated depth should be: elther, ± 1metre on the shallow range scale, ± 5 metres on the deep range scale, or, ± 5 per cent of the indicated depth, whichever is the greater. The performance of the equipment should be such that it will meet the requirements of the Recommendation when the ship is rolling ±10° and/or pitching ±5°.
Sonar
A sonar is an echo sounder whose sound propagation can be directed other than straight down. Active sonar transducers emit an acoustic signal into the water. Objects in the path of the sound pulse will return an "echo" to the sonar transducer.
The sonar determine the range and the orientation of the object by determining the the time between the emission and the reception of the sound puls. Side scanning sonar units are towed after a vessel and transmit horizontally, which is useful for surveying.
Fishermen have good use of a Sonar equipment in their search for fish. Forward-transmitting sonar can be used during harbour and anchoring manoeuvres. It transmits straight forward and down in a narrow sector and the result is shown as a profile on the screen.