 +7 (812) 4-673-673
+7 (812) 4-673-673
Analysis of the average time between failures (MTBF) of NAVIGAT products
Внедрение новых материалов и новых конструкций на морских судах требует, чтобы они (материалы и конструкции) выдерживали новые уровни стресса. Обеспечение качества и надежности имеет первостепенное значение для поставщиков ключевых навигационных компонентов, таких как гирокомпасы.
1. Введение
Эта статья знакомит с современными технологиями гироскопов Northrop Grumman Sperry Marine (NGSM), доступными на рынке для приложения Maritime/SOLAS. Оно включает в себя перечень продуктов, доступных в интегрированной системе управления NGSM CompassNet.
Рассмотрим действующий высококачественный волоконно-оптический гироскоп (FOG) NAVIGAT 3000, а затем новые выпущенные Spinning Mass Gyrocompass NAVIGAT 100 и 200 и полный перечень нового FOG NAVIGAT 2200, выпущенный в конце 2016 года.
Были проведены исследования надежности датчиков гироскопов, на предмет предсказания среднего времени между отказами (MTBF) при работе в коммерческой морской среде, военно-морской защищенной коммерческой (NS (C)).
Использовались две различные методики расчета - первый из них включал данные в реальном времени, полученные с NAVIGAT 3000, входе эксплуатации с 2014 года. Второй метод основан на расчете с использованием базы данных программного обеспечения NAVIGAT 100, 200 и NAVIGAT 2200.
Данные, полученные для NAVIGAT 3000, основаны на датчике волоконно-оптического гироскопа (FOG), интерфейсе и блоке питания (IPSU) и группах управления и отображения (CDU), установленных с 1 ноября 2014 года по 16 марта 2016 года. Результатом является среднее время между отказами MTBF в режиме реального времени, более чем в 4 раза, превышающее его спецификацию MTBF. Результаты теоретического анализа для других продуктов показали очень хорошие согласованные значения MTBF соответственно для датчиков NAVIGAT 100, 200 и 2200. Следует отметить, что показатель MTBF не является эквивалентом ожидаемого прогноза. Опыт показывает, что прогнозируемые показатели MTBF обычно находятся на консервативной стороне, и на самом деле, срок службы продукта примерно в 3 раза выше, чем у исходного прогнозируемого MTBF.
Цель этой статьи - предоставить техническую и качественную информацию о гироскопических продуктах NGSM
1.1 Современные технологии, доступные для применений на флоте
В последние годы были разработаны альтернативные технологии для обычных спиннинг-масс-гироскопов. В частности, основное внимание уделяется не движущимся решениям на основе оптических или резонансных технологий. Оптические гироскопы используют эффект Саньяка для определения разницы во времени распространения между лучами света, движущимися в противоположных направлениях в оптической схеме замкнутого контура. Разница, создаваемая совместным вкладом двух световых лучей, обеспечивает индикацию положения датчика на земле и вращения Земли.
1.1.1 Технология вращающихся масс (Spinning Mass Technology)
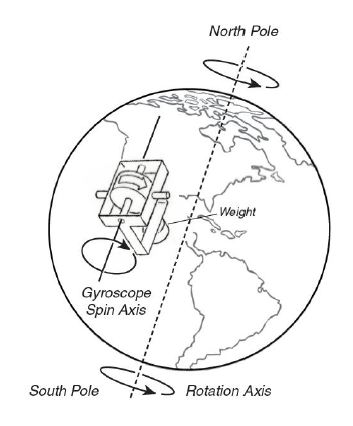
Гирокомпас спиннинг-масс использует два непрерывно управляемых механических связанных гироскопа (следовательно, «вращающуюся массу»), ось вращения которых удерживается в горизонтальной плоскости силой тяжести, действующей на вес меньше вращающейся массы, и, таким образом, эффект вращения Земли, чтобы ось вращения могла занимать положение, параллельное оси вращения Земли, и таким образом указывать на географический (истинный) север. В течение ряда лет NGSM разработала и улучшила высокотехнологичную гироскопическую сферу как элемент поиска на север, основанный на этом принципе. Внутри сферы гироскопии двум механически связанным гироскопам разрешено поворачивать по вертикали, но торсионные полосы влияют на определенное положение покоя, тогда как механическая связь обеспечивает, что результирующий вектор спина. Гироскопы остаются неподвижными относительно сферы гироскопа. Гироскопическая сфера плавает в поддерживающей жидкости внутри своего контейнера, минимизируя вибрационные воздействия на датчик.
1.1.2 Оптическая технология
Кольцевой лазер и FOGs используют эффект Саньяка для определения степени поворота. Гироскоп Ring Laser основан на технологии активного зондирования (активной лазерной полости), а волоконно-оптический гироскоп основан на технологии пассивного зондирования (длинные петли оптического волокна). Поскольку он обладает многочисленными преимуществами по сравнению с механическими гироскопами, кольцевой лазер является инструментом, используемым в основном для высокопроизводительных устройств. Это связано с превосходным уровнем точности, требуемым активной полостью и многочисленными зеркалами. Напротив, в FOGs луч света разделяется на два и соединен в противоположных направлениях в длинном контуре оптического волокна, действующего как полость. Из-за эффекта Саньяка луч, идущий против вращения, испытывает немного более короткую задержку пути, чем другой луч. Полученный дифференциальный фазовый сдвиг измеряется с помощью интерферометрии. Оптический интерферометрический результат обеспечивает движение гироскопа. 3-х осевая конфигурация гироскопа FOG является точной и экономичной технологией, которая может обеспечить точные гироскопические результаты с превосходной надежностью из-за отсутствия движущихся частей и отсутствия подвижных деталей в сочетании с очень коротким временем запуска. Northrop Grumman разработали несколько гироскопов на основе этой технологии, которые были адаптированы для использования в морской отрасли. NGSM хорошо известен как ведущий разработчик и производитель продуктов FOG, таких как MK39 и NAVIGAT 3000.
2. Анализ Эксплуатационной Надежности
2.1 Методика Оценки Надежности
Были приняты различные методологии надежности. Анализ NAVIGAT 3000 основан на данных, полученных в период с декабря 2014 года по март 2016 года. Затем к данным был применен анализ хи-квадрат для определения, измеренного MTBF реального времени. Для NAVIGAT 100, 200 и NAVIGAT 2200, анализ надежности количества частей был произведен с использованием программного обеспечения надежности RAM Commander. Составляющие спецификации для всех компонентов были импортированы в RAM Commander, и был выполнен прогноз надежности деталей. В исключительных случаях, когда показатели сбоев оказались нереалистичными или недоступными из библиотек, были введены определенные пользователем значения. Хотя традиционно большая часть информации о MTBF собирается в лабораторных условиях и поставляется в качестве среды «Ground Fixed» (GF), в NGSM считают, что такой анализ не был бы уместным, поскольку он не отражает жесткость, типичную для морской среды, в которой гирокомпасы будут работать. Как следствие, MTBF морских продуктов учитываются в рамках коммерческой морской среды (NS (C)), которая представляет собой гибридную среду между военным 217F Naval Sheltered (NS) и оригинальным GF.
2.2 Анализ Данных
Существуют десятки возможных конфигураций оборудования CompassNet от одиночных NAVIGAT 100 до тройных и четырехместных конфигураций с любым количеством комбинаций NAVIGAT 100, 200, 2200. Для этой задачи рассмотрены следующие конфигурации:
-
NAVIGAT 100 Single Compass
-
NAVIGAT 200 Single Compass
-
NAVIGAT 200 Dual Compass
-
NAVIGAT 2200 Dual Compass
Вышеупомянутые симуляции выполнялись на RAM Commander, патентованном ПО, который способен различать надежность и работоспособность (R&M). Анализ проводился с помощью модулей блок-схемы надежности (RBD).
2.2.1 NAVIGAT 3000 FOG
Анализ этого продукта основан на данных, полученных на работающем оборудовании между 1 ноября 2014 года и 16 марта 2016 года.
|
данные |
от |
до |
|
073516-0000-000 |
Октябрь 2012 |
Ноябрь 2014 |
|
073519-0000-000 |
Ноябрь 2014 |
сегодняшний день |
Единственное различие между двумя номерами деталей - это программное обеспечение. Поэтому, поскольку две части имеют идентичную аппаратную сборку, для оценки измеренного MTBF использовались начисленные часы работы для обоих элементов. Общее начисленное время работы для всего количества датчиков NAVIGAT 3000 составляет от 827 376 часов до 1 марта 2016 года, без зарегистрированных аппаратных сбоев (запись до сих пор сохраняется). Поскольку некоторые устройства находятся за пределами гарантийного срока, мы ввели некоторые фиктивные сбои для компенсации возможных сбоев. Общее количество фиктивных сбоев составляет 3,5% от общей численности. Используя анализ хи-квадрат при консервативной достоверности в 60% и в среде (NS (C)), сенсорный анализ показал MTBF 130 000 часов по всей популяции поля. Это означает MTBF> 20 лет для каждого датчика NAVIGAT 3000.
2.2 NA2VIGAT 100 и 200 Гироскопы
Два набора тестов были выполнены с использованием гирокомпасных датчиков NAVIGAT 100 и 200. Спецификации для двух продуктов были импортированы в RAM Commander. Хотя до 80% компонентов уже были в библиотеках симулятора, остальные были проставлены вручную. Были оценены две различные конфигурации: единственный компас и система двойного компаса (только NAVIGAT 200). Теоретическое предсказание MTBF, основанное на 100% коэффициенте использования, для датчиков NAVIGAT 100 и 200, составляло 87 166 часов и 115 855 часов соответственно в среде (NS (C)).
2.2.3 NAVIGAT 2200 FOG
Тот же метод был выполнен для NAVIGAT 2200. Спецификации для NAVIGAT 2200 были импортированы в RAM Commander и, где необходимо, скорости отказа компонентов, недоступные в библиотеках симулятора, были проставлены вручную. Были оценены две различные конфигурации одиночной ВОГ и двойной системы ВОГ. Прогноз надежности для датчика NAVIGAT 2200 в вышеуказанных конфигурациях показал MTBF 51,200 часов при 100% -ной загрузке в среде (NS (C)). Что касается гирокомпасов NAVIGAT 100 и 200, то следует отметить, что показатель MTBF не совпадает с ожидаемым прогнозом жизни. Как поясняется в разделе 4.1.1 Приложения А, результат анализа «частей счетчика» является быстрым, но пессимистичным, поскольку он уменьшается в 3 раза. Поэтому мы ожидаем, что производительность NAVIGAT 2200 будет неэффективной в соответствии с требованиями NAVIGAT 3000, т.е. примерно 150 000 часов.
Приложение А
3.1 средняя наработка на отказ (mtbf)
3.1.1 Что такое MTBF?
MTBF устройства представляет собой продолжительность работы устройства, прежде чем произойдет сбой компонента. Сбой компонента может или не может привести к отказу устройства. Для новых продуктов MTBF прогнозируется. Как только определенное количество устройств достигает типичного времени службы, рабочие данные могут использоваться для определения MTBF без обслуживания. Основным методом прогнозирования MTBF является метод «подсчета деталей». Этот метод является быстрым, но пессимистичным (обычно в 3 раза). Пример: NAVIGAT 3000 FOG имел прогнозируемый MTBF от OEM> 40 000 часов и имеет фактическую производительность при эксплуатации> 130 000 часов. Примечание: MTBF не следует путать с продуктом, и он не учитывает плохую конструкцию или неправильную установку / использование.
3.1.2 Что является приемлемым значением наработки на отказ?
NGSM должен стремиться к достижению прогнозируемого блока MTBF в размере ≥ 40 000 часов, будет иметь 5% -ную отказоустойчивость в течение первых 18 месяцев использования и при условии, что блок имеет коэффициент использования 73%.
3.1.3 Что делать, если прогнозируемый MTBF меньше допустимого значения?
Если расчетное количество частей MTBF составляет <40 000 часов, рекомендуется более подробное вычисление MTBF для деталей. Это занимает намного больше времени и требует одобрения технической команды NGSM, поскольку они являются авторитетом проекта. Если напряжение деталей, предсказываемое MTBF, составляет <80 000 часов, то следует учитывать оценку затрат и результатов изменения конструкции.
3.1.4 Каким образом MTBF влияет на гарантии?
Прогнозируемый MTBF не должен использоваться изолированно для определения гарантийного обязательства. Для получения расширенных гарантий необходимо проконсультироваться с инженерной командой NGSM.