 +7 (812) 4-673-673
+7 (812) 4-673-673
Режимы работы радара
Радиолокационное изображение может быть представлено в нескольких различных режимах, каждый из которых имеет свои специфические преимущества и недостатки. Изображение может быть ориентировано заголовком вверх на экране (Головой вверх), направлением на север вверх (Север вверх) или курсом судна вверх (Курс вверх). Движение может быть организовано так, чтобы судно всегда находилось в центре изображения (Относительное движение, RM) или с неподвижными эхо-сигналами на суше (Истинное движение, TM). Существует несколько комбинаций движения и ориентации.
1. Головой вверх
Представление головой вверх показывает изображение объектов вокруг судна и линию курса судна, направленную носом вверх по экрану.
Движения на экране отображаются относительно положения корабля, так что по мере его движения вперед, эхо окружающей обстановки перемещается от верхнего к нижнему краю экрана. Это полезный режим для навигации в замкнутых водах, таких как архипелаг.
О риске столкновения можно судить так же, как и при визуальном наблюдении, то есть эхо, приближающееся по неизменному пеленгу, представляет риск столкновения.
Однако, этот режим не дает информации о курсе и скорости других судов без дополнительной работы (построение радиолокационного графика).
Еще одним недостатком этого режима является то, что при повороте судна меняется и изображение. Это может сбить с толку.
 2. Север верх
2. Север верх
При подключении к гирокомпасу радиолокационное изображение может быть ориентировано так, чтобы Север был представлен в верхней части экрана. Затем ЛИНИЯ КУРСА, обозначающая носовую часть, будет ориентирована вдоль курса судна и пеленги способны легко считываться.
Преимущества этого режима в том, что он соответствует изображению карты, а изображение на Север вверх не вращается во время поворотов. Радиолокационное изображение стабилизировано. Если курс не прямолинейный, изменится только ориентация линии курса. Карту не нужно поворачивать, чтобы она соответствовала радиолокационному изображению. Однако некоторым навигаторам кажется странным двигаться "вверх ногами", когда они идут южным курсом.
 3. Курс вверх
3. Курс вверх
Используя информацию компаса, изображение стабилизируется на фактическом курсе с направлением вверх. До такой-то степени, это напоминает движение головой вверх. Однако, когда курс меняется, не важно по какой причине, поворачивается линия курса, а не изображение. Даже большие повороты могут быть сделаны без поворота изображения. Однако, после завершения поворота необходимо скорректировать изображение так, чтобы заголовок снова был направлен вертикально. Некоторые радарные установки будут сброшены автоматически. Повороты в этом режиме отображаются с их истинными значениями.
Север верх и Курс верх, это, так называемые, стабилизированные изображения. Во время поворотов движется только линия заголовка.
 4. Смещение от центра
4. Смещение от центра
Бывают ситуации, такие, как проход по архипелагу, когда навигатор хочет использовать как можно более четкий масштаб и в то же время видеть как можно дальше вперед. Эти, в другом случае, противоречивые требования, возможно сделать путем смещения изображения ОТ ЦЕНТРА. Смещение от центра может использоваться в сочетании со всеми режимами.
Движение
Головой вверх представлено в относительном движении. Движение на север и курс вверх могут сочетаться либо с относительным движением, либо с истинным движением. Относительное движение означает, что положение судна сохраняется в центре изображения, а другие цели перемещаются относительно него. Движение других судов отображается, как результат их движения и движения собственного судна навигатора (относительное движение). Относительное движение позволяет довольно легко оценить риск столкновения, но для того, чтобы получить информацию о курсе и скорости другого судна, необходимо выполнить радиолокационную съемку.
При истинном движении, положение судна на экране перемещается в направлении линии курса и со скоростью судна. В результате движущиеся объекты, такие как, другие корабли, будут представлены с их правильным курсом и скоростью. Это требует, чтобы радар был соединен с компасом и картой (STW), чтобы отображать истинное движение. Изображение будет стабилизированным относительно земли истинным движением. Скорость также можно ввести вручную. Поскольку изображение судна непрерывно перемещается вверх по экрану, положение изображения на экране должно быть скорректировано, когда расстояние между положением судна и краем экрана становится слишком маленьким.
Требование ИМО предусматривает, что для предотвращения столкновений, радар должен быть стабилизирован на море, поскольку Правила предотвращения столкновений на море не учитывают, конечно, для суши. Поэтому, если присутствуют течения, изображение земли не будет оставаться совершенно неподвижным.
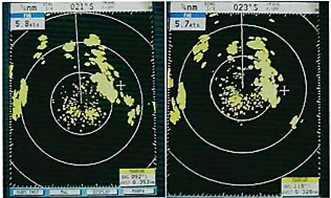
Истинное движение с Курсом вверх. Курс отображается в цифровом виде в верхней части экрана. На изображении справа показано как расстояние до верхнего края экрана уменьшается по мере продвижения судна вперед. Сравните с изображением слева
Истинное движение дает информацию о курсе и скорости приближающихся судов. Его недостаток заключается в том, что он не дает информации об относительном пеленге, который очень важен для оценки риска столкновения.