 +7 (812) 4-673-673
+7 (812) 4-673-673
Как работает судовой эхолот: устройство, принцип действия и чтение данных

Судовой эхолот — это навигационный гидроакустический прибор, который измеряет глубину под килем судна путем излучения звуковых импульсов и приема их эха.
Безопасность мореходства опирается на точное понимание того, что находится под днищем судна. Разберем устройство этого оборудования от базовых принципов распространения звуковых волн до сложных алгоритмов цифровой фильтрации помех.
Зачем нужен эхолот на судне?
Навигационный эхолот непрерывно измеряет глубину для предотвращения посадки многотонного судна на мель.
Современное судно представляет собой тяжелое плавучее строение с осадкой, которая может превышать 20 метров. Движение по мелководным проливам, заход в акваторию порта или маневрирование в районах с изменчивым рельефом дна требует посекундного контроля расстояния от самой нижней точки корпуса до грунта. Прибор берет на себя эту функцию, предоставляя вахтенному помощнику капитана непрерывный график изменения глубин в режиме реального времени.
От ручного лота к цифровой гидроакустике
До появления цифровых эхолотов моряки измеряли глубину свинцовым лотом на веревке.
В середине прошлого века судах стояли громоздкие эхолоты с бумажными самописцами, которые выжигали или выцарапывали отметки на рулоне бумаги. Лента часто заминалась из-за влажности, самописцы выходили из строя в самый неподходящий момент, а для анализа нарисованного рельефа иногда требовалось размотать весь рулон. Пытаясь увеличить точность, инженеры пробовали внедрить сложные фазированные антенные решетки, аналогичные тем, что используют на военных подводных лодках. Эта технология совершенно не прижилась на коммерческом флоте. Оборудование стоило дорого и занимало слишком много места, а его калибровка требовала привлечения специалистов.

Старая модель эхолота с лентой
Современное решение оказалось куда элегантнее и надежнее. Переход на цифровую обработку принимаемого сигнала с выводом данных на выносной индикатор данных (жидкокристаллический дисплей или газоразрядные индикаторы) полностью устраняет потребность в движущихся частях и расходных материалах. Микросхемы обработки отраженного сигнала отсеивают шумы от работы гребного винта, и сохранять в энергонезависимой памяти историю глубин за последние двадцать четыре часа.
Как звук измеряет глубину под килем?
Эхолот рассчитывает глубину по формуле: время прохождения звукового импульса до дна и обратно умножается на скорость звука в воде и затем делится на два.
H - глубина от излучателя до дна (в метрах).
V - скорость распространения звука в водной среде (в среднем принимается за 1500 м/с).
t - время с момента излучения акустического импульса до момента возвращения эха на приемник (в секундах).
Скорость распространения акустических волн в соленой воде не является константой. Она напрямую зависит от плотности среды, которая меняется под воздействием температуры и уровня солености.
Средние скорости распространения звука в морях
| Море/регион | Скорость, м/с |
|---|---|
| Красное море | 1548 |
| Средиземное море | 1522 |
| Гольфстрим | 1491 |
| Черное море | 1482 |
| Берингово море | 1476 |
| Норвежское море | 1469 |
| Антарктика | 1466 |
| Финский залив | 1466 |
*Точные значения варьируются по сезонам и глубине. Для научной работы рекомендуется использовать расчет по формулам (UNESCO/Del Grosso) с реальными данными CTD-зондов.
Скрытая гидроакустика
Излучателю требуются миллисекунды, чтобы перестать вибрировать после отправки мощного акустического импульса и переключиться в режим тонкого приема. В эти мгновения прибор физически глух к любым входящим сигналам. Расстояние, которое звук успевает пройти за это время невидимости, образует слепую зону под днищем корпуса, обычно равную половине метра.
Частота отправки зондирующих импульсов также не является постоянной величиной. На мелководье процессор заставляет систему пинговать дно до десяти раз в секунду, обеспечивая непрерывную картину рельефа для безопасного маневрирования.
Из каких блоков состоит судовой эхолот
Классический судовой эхолот состоит из трех основных элементов: приемопередатчика или аналоговой части, вибратора (ГА антенны) встроенной в днище судна и устройства отображения на навигационном мостике.
Оборудование разделено на забортную часть, контактирующую с агрессивной соленой средой, и вычислительную электронику, спрятанную в сухих кондиционируемых помещениях судна. Все компоненты связаны между собой экранированными кабельными трассами, защищенными от электромагнитных наводок силовых установок.
Трансдьюсер (вибратор)
Трансдьюсер преобразует электрическую энергию в звуковую волну с помощью пьезоэлектрического эффекта, а затем принимает отраженное эхо и преобразует в электрические колебания.

NGM100-200-15L |

TGM60-50-10L/50KHz/600W |
Трансдьюсеры в нашем каталоге
Пьезокерамический элемент внутри герметичного корпуса при подаче переменного напряжения начинает быстро сжиматься и расширяться — тысячи раз в секунду. Это проявление обратного пьезоэлектрического эффекта. В результате формируется звуковой импульс, который распространяется в воде. Достигнув дна или другого препятствия, сигнал отражается и возвращается обратно. Когда отраженная волна приходит к датчику, она воздействует на тот же пьезоэлемент и едва заметно деформирует его. Возникает уже прямой пьезоэлектрический эффект: механическое воздействие преобразуется в слабый электрический сигнал.
Этот сигнал передается по кабелю в прибор, где обрабатывается. Весь процесс занимает очень короткое время, что позволяет определить расстояние до дна по задержке между излучением и приемом сигнала.
Приемопередатчик и дисплей управления
Приемопередающий блок формирует электрические импульсы для излучения и принимает отраженный сигнал. Блок отображения информации и управления отображает результат, преобразуя задержку сигнала в наглядное изображение рельефа дна.
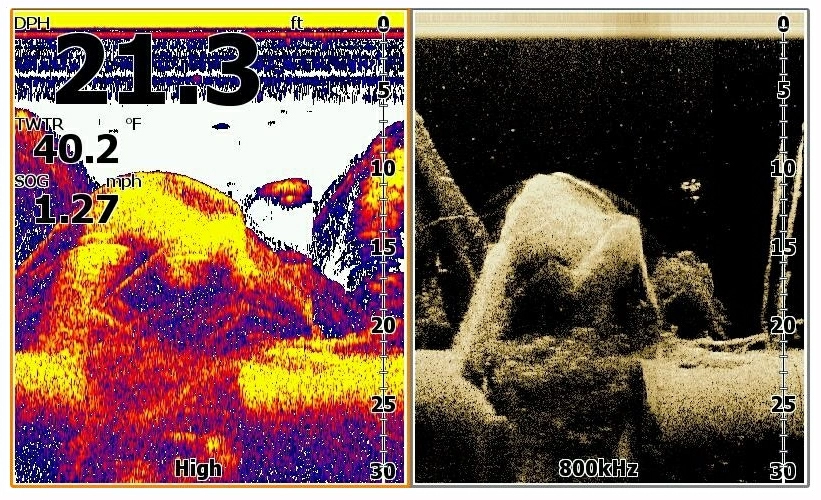
Этот блок связывает работу датчика и электроники прибора. Он усиливает слабое эхо, ослабляет помехи с помощью цифровой обработки и передает подготовленные данные на экран. Дисплей на панели управления выводит эхограмму — в цвете или черно-белую: по горизонтали на ней откладывается время (или ход), а по вертикали — глубина под судном.
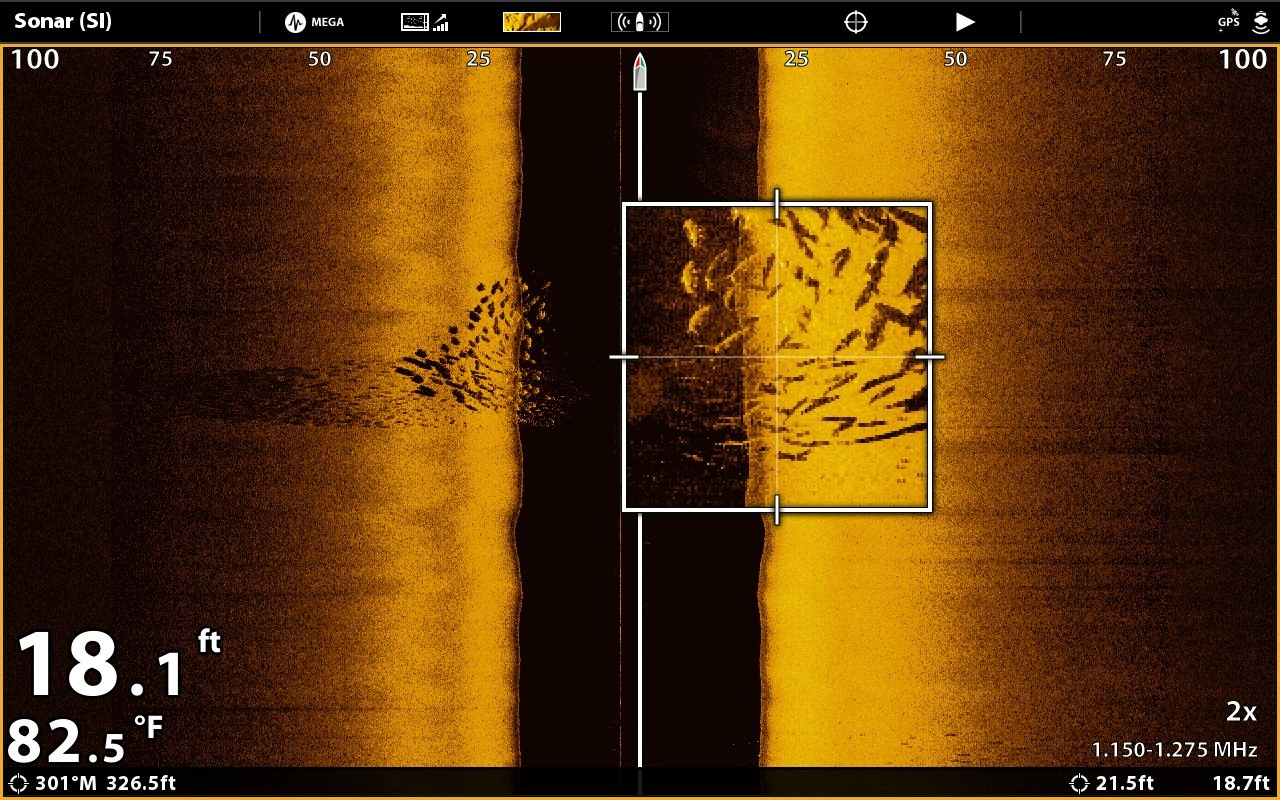
Пример отображения рыб на эхолоте
Почему морские эхолоты используют две частоты (50 и 200 кГц)
Частота 200 кГц дает высокую детализацию на мелководье, а 50 кГц применяют для глубоководных измерений, так как низкие частоты лучше пробивают толщу воды.
Выбирая частоту 200 кГц ради высокой детализации рельефа дна при швартовке, мы неизбежно жертвуем пробивной способностью звука на больших глубинах. Затухание высокочастотного акустического сигнала составляет около шестидесяти децибел на каждый километр пройденного пути в воде. Низкочастотные волны обладают колоссальной энергией проникновения, легко пробивая километровые толщи океана, но их широкий угол излучения собирает слишком много мусорных переотражений на мелководье.
Таблица Сравнительная характеристика рабочих частот судового эхолота.
| Параметр | Частота 50 кГц (Низкая) | Частота 200 кГц (Высокая) |
|---|---|---|
| Угол акустического луча | Широкий (от 35 до 45 градусов) | Узкий (от 6 до 10 градусов) |
| Максимальная рабочая глубина | Более 1500 метров | До 300 метров |
| Детализация дна | Низкая (размытый контур) | Высокая (четкая граница грунта) |
| Применение | Открытый океан, глубоководье | Портовые акватории, каналы |
Аргумент против классических эхолотов
Существует мнение, что классические эхолоты устарели, так как современные трехмерные сонары и точные электронные карты дают больше навигационных данных.
Апологеты тотальной цифровизации флота утверждают, что смотреть строго под киль совершенно бессмысленно, когда судно уже находится непосредственно над подводным препятствием. По их логике, впередсмотрящие сонары в неразрывной связке с электронными навигационными картами полностью исключают риск внезапной посадки на мель. Этот контраргумент справедлив для исследовательских судов ледового класса или премиальных моторных яхт, маршруты которых пролегают по идеально картографированным и предсказуемым акваториям. Там бюджет проекта позволяет устанавливать хрупкие многолучевые гидроакустические комплексы.
Почему эхолот показывает ложную глубину?
Эхолот выдает ложные значения из-за аэрации под килем, резкого изменения температуры воды, переотражения сигнала от днища судна или сильной бортовой качки.
| Поправки к скорости звука при изменении температуры | ||||||
|---|---|---|---|---|---|---|
| t° | 0 | 5 | 10 | 15 | 20 | 25 |
| Δc_(t=1°) | 4,4 | 4,1 | 3,6 | 3,2 | 2,8 | 2,4 |
| Сводная таблица поправок к скорости звука | |||
|---|---|---|---|
| Факторы | t = 1°C | S = 1‰ | p = 1 атм |
| Δc, м/с | 3,6 (3,3) | 1,2 | 0,2 |
Аэрация представляет собой плотное облако воздушных пузырьков, которое образуется под днищем судна при длительной работе гребного винта задним ходом или во время сильного шторма. Воздух - непреодолимая преграда для звука в воде. Акустический импульс разбивается об это пузырьковое облако и возвращается обратно, заставляя прибор рисовать на экране нулевую глубину посреди глубокого океана. Эффект ПЗК возникает на границе разделения плотности слоев воды, это вызвано перепадами температур, солености, и плотности различных водных слоев. Разница в плотности воды настолько велика, что звук отражается от границы слоев, как от твердого бетонного пола. Реверберационная помеха проявляется на каменистом мелководье, когда мощный сигнал отсканировав дно, ударяется о стальное днище судна, снова летит ко дну и возвращается во второй раз, рисуя на экране фантомную двойную глубину. Или рисуя засветку не соответствующую действительному рельефу дна.
3 фатальные ошибки судоводителей при настройке эхолота
Человеческий фактор регулярно приводит к авариям из-за неверного ввода осадки, чрезмерного усиления сигнала и путаницы с частотами при швартовке в порту.
Первая ошибка заключается в банальном игнорировании поправки на осадку судна. Суть проблемы математически проста. Прибор физически измеряет расстояние от своего излучателя на днище до морского грунта. Мотив судоводителей прозрачен — это обычная усталость и халатность после изматывающей грузовой операции в порту, когда штурман решает отложить ввод новых данных об осадке на потом. Цена этой секундной слабости катастрофична. Посадка на мель огромного контейнеровоза из-за неверного чтения глубин влечет разрыв обшивки корпуса, ремонт которого обходится судовладельцу в суммы от одного до двух миллионов долларов США, совершенно не считая астрономических счетов за услуги спасательных буксиров.
Вторая ошибка кроется в бездумном выкручивании ручки усиления сигнала на абсолютный максимум при временной потере дна. Вместо ожидаемого появления четкой линии грунта, экран дисплея полностью заливается сплошным цветовым шумом от взвешенного песка, мелкого мусора и планктона. Мотив такого действия продиктован паникой неопытного помощника капитана, искренне желающего помочь электронике пробить мутную толщу воды. В результате этой ошибки вахтенный офицер полностью теряет способность различить реальную мель на фоне созданного им же информационного хаоса.
Третья ошибка связана с использованием глубоководной частоты на экстремальном мелководье. Оставляя включенной частоту 50 кГц при заходе в тесную акваторию порта, штурман активирует широкий акустический луч. Этот луч начинает цеплять бетонные причальные стенки, соседние пришвартованные суда и шпунтовые ограждения, выдавая их отражения за реальный рельеф дна. Мотив кроется в элементарном незнании волновой физики. Удар винторулевой группой о скрытое подводное препятствие при маневрировании обойдется заменой лопастей и непредвиденный простой судна в сухом доке.

|

|

|
|
Raymarine Wi-Fish |
Lowrance HOOK2 |
Simrad StructureScan 3D |
Какие требования предъявляет Морской Регистр к навигационному оборудованию?
Согласно конвенции SOLAS и правилам РМРС, суда валовой вместимостью от 300 тонн обязаны иметь сертифицированный эхолот для измерения глубин до 200 метров.
Международная морская организация не оставляет вопросов комплектации навигационного мостика на усмотрение судовладельцев.Эхолот предназначен для надежного измерения, наглядного представления, регистрации и передачи в другие судовые системы данных о глубине судна. Эхолот должен функционировать на всех скоростях переднего хода судна от 0 до 30 уз в районах с резко меняющимся рельефом дна, скалистым, песчаным и илистым грунтом, а также в условиях сильной аэрации воды, ледяной и снежной шуги, колотого и битого льда.
Эхолот должен обеспечивать измерение глубин под вибратором в диапазоне от 1 м до 200 м.
Современные правила обязывают интегрировать гидроакустические системы с судовым регистратором данных о рейсе, известным как черный ящик, куда непрерывно записывается вся телеметрия. Любое отклонение от этих стандартов ведет к немедленному задержанию судна инспекторами портового контроля до полного устранения неисправностей.
Что необходимо для сдачи Дельта-теста и прохождения инспекции
Для успешной сдачи экзаменов и прохождения инспекции портовых властей необходимо знать принцип работы прибора, уметь менять частоты и настраивать диапазоны работы прибора и опасные изобаты.
Успешное прохождение компьютерного тестирования или личного собеседования с инспектором требует безупречного владения терминологией. Судоводитель обязан уметь своими словами объяснить разницу между прямым и обратным пьезоэлектрическим эффектом. Важно продемонстрировать проверяющему навык установки звуковой сигнализации опасной глубины, которая предупредит экипаж о резком выходе на мелководье. Знание того, как вручную ввести поправку на осадку и переключить прибор с высокочастотного режима на низкочастотный, является неоспоримым доказательством вашей морской квалификации.