+7 (812) 4-673-673
+7 (812) 4-673-673
Оборудование мостика для судов неограниченного плавания
Здесь описывается стандартный навигационный и морской пакет оборудования, обязательный для судов неограниченного плавания.
Навигация очень изменилась с появлением системы GPS (Global Positioning System). Многие годы для определения позиции судна использовался секстан. Так как этот метод основан на визуальной ориентации на звёзды, планеты, солнце и луну, погодные условия часто затрудняли определения. С появлением спутников и сложных компьютерных систем навигация развилась до точного всепогодного инструмента.
Компасные системы
Магнитный компас
Все суда водоизмещением от 150 GT и выше должны быть оснащены рулевым компасом. Самые древние простые компасы – магнитные. Они используют земной магнетизм. Недостаток магнитного компаса – направление магнитного поля земли не совпадает с направлением оси вращения земли.
Южный полюс магнитной стрелки, если подвесить её свободно в воздухе, будет показывать на Северный магнитный полюс земли. Этот полюс сейчас расположен примерно в 100 милях в стороне от географического полюса. Стандартные магнитные компасы до сих пор должны быть на всех судах.
Положение магнитного северного полюса всё время меняется. Кроме того, магнитное поле, наблюдаемое на борту судна, находится под влиянием стали, из которой судно сделано. Поэтому компас должен быть откалиброван, чтобы компенсировать магнитное поле самого судна, при вводе в эксплуатацию, и в дальнейшем, когда девиация станет слишком большой. На компас также может влиять чувствительный к магнетизму груз.

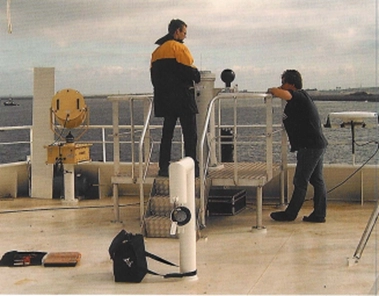
Стандартный магнитный компас и работающий инженер по компенсации

Вид внутри мостика
Гирокомпас
Суда водоизмещением 500 GT и выше должны быть оборудованы гирокомпасом. Существует 3 различных вида гирокомпасов:
- сухие
- волоконно-оптические.
В противоположность магнитному компасу, гирокомпас зависит от угловой скорости земли, так как устанавливает себя вдоль оси вращения земного шара. По существу гирокомпас состоит из гироскопа, который, вращаясь с высокой скоростью, поддерживает направление своей оси постоянным в пространстве, независимо от того, как поворачиваются или наклоняются поддерживающие диски. Это свойство известно как устойчивость оси (в пространстве). Магнитные силы не влияют на установившееся направление.
Жидкостной гирокомпас устанавливается в нактоузе – специальном ящике, где гироскоп (волчок)находится в шарообразном кожухе. Шар плавает в специальной жидкости, где её удельный вес удерживает шар точно вертикально в другом кожухе, позволяя гироскопу находить своё направление в пространстве. Внутри плавающего шара установлен электромотор, гироскоп – его ротор. Электроконтакты подсоединяются через сложные скользящие механизмы.
При определённых условиях ось гироскопа устанавливается в направлении истинного севера. Из-за вращения земли ось (раскрутившегося) гироскопа должна двигаться (относительно нактоуза), при этом сохраняя своё направление в пространстве. Движение оси – сочетание дрейфа и крена, вместе образующие это кажущееся движение (можно сказать, что на самом деле это нактоуз движется относительно оси гироскопа – прим. перев.). Дрейф – это горизонтальное отклонение от выбранного направления в пространстве, из-за вращения земли. Величина и направление дрейфа зависят от широты места. При наличии трения (которое уже присутствует из-за жидкости, в которой плавает шар) ось гироскопа будет постепенно смещаться к направлению оси земли, т. е. истинному северу. Крен (наклон) – результат широты места. На экваторе направление оси гироскопа совпадает с горизонтом. В более высоких широтах это будет направление в точку над Северным полюсом Земли, образуя вертикальный угол наряду с горизонтальным.
Это может быть откорректировано силой тяжести, т. е. весом, или системой из регулируемых поплавков в ртути. Добавленный вес придаёт шару положение, параллельное горизонту. Настройки зависят от текущей широты места. Движение корабля может также вносить своё отклонение.
Гироскоп скорректирует свои показания до равнодействующей истинного курса судна и направление вращения Земли, на восток. Инструмент сам по себе имеет некое постоянное отклонение, эта девиация компенсируется электроникой.
Нактоуз обычно устанавливается в техническом помещении рядом с мостиком судна. Часто его помещают на нижних палубах (ближе к центру масс корабля – прим. перев.), чтобы уменьшить поперечные силы от движения корабля (качки). В различных местах, где это нужно, устанавливаются репитеры, показывающие курс судна, для навигации и других целей. Обычно это место рулевого, на обоих крыльях мостика, иногда около магнитного компаса для облегчения его калибровки.
Принцип действия сухого гирокомпаса тот же, что и у жидкостного. Большое его преимущество в том, что сухой гирокомпас не требует обслуживания на протяжении его срока между неисправностями (mean time between failure, MTBF).
Волоконно-оптический гирокомпасы
Последние разработки в сфере гироскопов, также электрические – волоконно-оптические гирокомпасы. Это полностью твердотельное устройство, в котором нет вращающихся или других движущихся частей. Основа его – лазерный луч, проходящий через горизонтальную катушку с намотанным стекловолокном. На входе в катушку луч разделяется на две равные части, одна часть идет налево, другая направо (навстречу друг другу).
Если катушка не вращается, оба луча приходят одновременно. Если катушка провернулась, лучи не вернутся в исходную точку одновременно, образуя фазовое отклонение. Три катушки по осям X, Y и Z дают возможность вычислить направление истинного севера. Этому твердотельному устройству нужно совсем мало времени на приведение (определения севера).
Электронный магнитный компас (Fluxgate compass)
Компас Fluxgate (основанный на датчиках магнитного потока) – полностью электрический компас. Две катушки, расположенные под углом 90° друг к другу, дают электрический ток, когда магнитный поток (от магнитного поля Земли) проходит через них. По разнице измеренных токов вычисляется направление на магнитный север.
Сигнализация об отклонении от курса
Когда судно во время прохождения отрезка пути произвольно меняет курс (нежелательно отклоняясь от заданного курса на значение, больше допустимого), на мостике должен звучать предупреждающий сигнал. Часто это устройство совмещается с гироскопом. Возможно использование для этих целей и магнитного компаса.
Требуется установить допустимое отклонение от курса. При использовании гироскопа это происходит автоматически.

Вид на открытый гирокомпас. Серый цилиндр в центре вмещает в себе гироскоп.
Охлаждение жидкостное
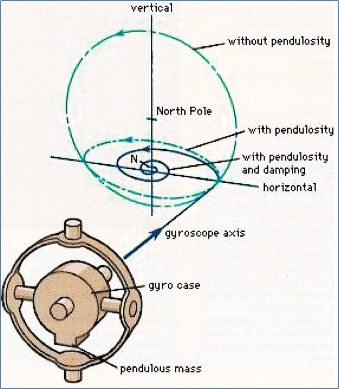
Кольцевая линия показывает «кажущееся» движение оси гороскопа вокруг Полярной звезды при отсутствии маятниковой массы. Добавление маятниковой массы (нижняя часть рисунка) превращает кольцевое движение в эллиптическое; эллиптическое движение при наличии затухания вырождается в точку, гироскоп становится гирокомпасом, показывающим на истинный север.
Радар
Радар (RADAR, Radio Detection and Ranging) с автоматической функцией прокладки (ARPA, Automatic Radar Plotting Aids) и вращающейся передающей/принимающей антенной, обычно Х-диапазона (частоты 8-12 ГГц). Для судов больше чем 3000 GT должен устанавливаться второй радар, обычно S-диапазона (частоты 3-4 ГГц). Причина выбора двух радаров с разными частотными диапазонами – их отличающиеся возможности справляться с условиями окружающей среды, такими как туман, дождь, помехами от волн.
Радарная установка состоит из приемопередатчика и вращающейся антенны. Результат отображается на дисплее. Приемопередатчик – ящик, закрепленный прямо под антенной. Сама антенна (сканер) устанавливается на радарной мачте, обычно над рулевой рубкой.
Сканер вращается. Очень короткий радиоимпульс посылается от лучевой трубки на отражатели сканера и покидают его в виде тонкого луча. Когда этот луч отражается от объекта, часть его энергии возвращается назад и может быть принята сканером. По временному интервалу между передачей и приемом сигнала может быть вычислено расстояние до объекта.
Направление даётся позицией сканера относительно центральной линии судна. Отраженный импульс виден на дисплее как точка.
Досягаемость (максимальная дальность обнаружения из-за кривизны поверхности моря) радара определяется высотой сканера и высотой цели над уровнем моря.
Разумные меры предосторожности
Если радарное оборудование должно работать в порту, для соблюдения разумных мер предосторожности необходимо обеспечить:
- если работа требует, чтобы сканер не вращался, он должен быть направлен на ненаселенные районы, например в сторону моря;
- никто не должен заглядывать в излучающую сторону щелевого волновода (подобие открытой коробки) сканера;
- никто не сможет попасть между выходным «рожком» передатчика и отражателем большего сканера;
- нельзя упускать из виду риск быть ударенным вращающимся сканером, если необходимо работать рядом.
Любая работа с этим оборудованием должна проводиться компетентным персоналом, использующим безопасные методы работы, так что бы ни они, ни окружающие не подвергались риску.
Глобальная система позиционирования GPS
Устройства GPS настолько просты и надёжны, что почти все суда, от маленьких яхт до самых больших судов в мире, снабжены одним или несколькими ресиверами (приёмниками) GPS.
GPS – это независимая автоматическая система позиционирования с ненаправленной (круговой) антенной. Входящие данные генерируются спутниками. Изначально систем была разработана для нужд Департамента обороны США, но потом была сделана доступной для гражданских нужд. Европа создаёт свою альтернативную систему, GALILEO. Создана и работает российская система GLONASS, китайская BEIDOU, ведутся работы над другими национальными системами позиционирования (прим. перев.).
DGPS (Differential Global Positioning System), дифференциальная GPS – более точная система за счет использования дополнительного сигнала от опорного передатчика. Его позиция известна с высокой точностью, поэтому улучшает результат вычисления спутниковой позиции. Из-за ограниченного радиуса действия это локальное улучшение.
Существуют и используются различные технологии глобального DGPS, с использованием различных поправочных данных (прим. перев.).
Глобальные системы позиционирования работают с сигналами малой мощности, передаваемыми большим количеством спутников, облетающих Землю на высоте 20000 километров. Обычно в каждый момент времени приемник получает сигнал в среднем от 8 разных спутников.
Такие (D)GPS приемники дают не только позицию в данный момент времени (в координатах). Когда приемник (судно) движется, вычисляются также скорость и направление относительно грунта.
Автопилот
Автоматическая функция курса
Автоматические пилоты – устройства, которые сравнивают текущий курс по гирокомпасу с заданным курсом, и принимает корректирующие меры, если курс отличается от заданного. Большинство таких приборов в наши дни адаптивные, это значит, что они приспосабливаются к характеристикам судна, применяя минимальный угол поворота руля, чтобы вернуться на установленный курс. Автопилот также может быть настроен на определенный коэффициент усиления, максимальный угол поворота руля, максимальную скорость поворота судна.
Современные автопилоты настолько чувствительны, что начинают подруливать с минимального отклонения от заданного курса, ещё до того как рулевой это заметит. Таким образом, получается более прямой курс, чем сделал бы человек. Прямой курс экономит время и топливо.

Дисплей GPS
Функция автоматической проводки судна по заданной траектории движения
Система GPS, которая даёт курс и скорость через электронную карту ECDIS (Electronic Chart Display and Informarion System), или сам приемник GPS, делает возможным провести судно по запланированной траектории. Можно ввести путевые точки, в которых судно будет медленно поворачивать на следующий отрезок, после выдачи предупреждения и получения подтверждения.

3. Автопилот
4. Рулевое колесо (штурвал) с контролем угла поворота руля
5. Рулевой рычаг без контроля
6. Управление рулевым оборудованием
7. Индикаторы угла поворота руля (двойной руль)
8. Колесо выбора курса.
Система автоматической идентификации (AIS) передает данные о положении, курсе, скорости и идентификаторе судна в радиусе до 40 миль. Информация отображается на экранах радара и ECDIS как наложение на радарное изображение, что позволяет оперативно идентифицировать цели в условиях плохой видимости. По SOLAS V AIS класса A обязательно для судов свыше 300 GT, с интеграцией в ARPA для расчета CPA и TCPA.
Скорость и расстояние (лаг)
На судах водоизмещением более 500 GT должны измеряться скорость и дистанция по воде. Должен быть установлен один лаг с индикацией скорости и пройденного расстояния по воде. Это может быть, например, электромагнитный лаг. На мелкой воде так называемый Допплер-лаг может измерять скорость по воде и по грунту, путь по воде и по грунту. Это можно выбирать на дисплее.
Двухосевые лаги измеряют скорость вперед и назад, а также поперечное движение. Такой лаг используется на очень больших судах (танкерах, балкерах), чтобы контролировать силу удара о пристань при швартовке.
Индикатор угла поворота руля
На дисплее должно отображаться реальное положение руля. Обычно это показывается на установленном на палубе индикаторе, видимом отовсюду на мостике.
Индикатор скорости поворота (ROT, Rate of Turn)
Такие индикаторы должны устанавливаться на судах водоизмещением 50000 GT и выше. Скорость поворота важна для больших судов, чтобы определить время, необходимое для того, чтобы судно легло на желаемый курс.
Перед поворотом руль должен быть переведен в нужное положение, чтобы корабль начал поворачивать. Особенно долго реагируют на перекладывание руля большие суда.
На консоли в мостике есть дисплеи (с ROT). Наряду с RPM, направлением вращения винта, упором (pitch) для ВРШ – все эти параметры очень важны при маневрировании и швартовке. Такие дисплеи ставят также на крыльях мостика.
Ветер и звук
Суда с закрытыми рулевыми рубками, которые чувствительны к ветру при маневрировании, должны быть оборудованы указателем направления и силы ветра и системой приема звука. Она состоит из микрофонов снаружи и системой громкоговорителей внутри, способной передать направление приходящего снаружи звука.
Эхолот
Глубина воды под судном измеряется эхолотом. Трансдьюсер (антенна, датчик-излучатель эхолота) на днище судна посылает вниз акустические импульсы и получает отраженные сигналы. Расстояние между днищем судна и морским дном может быть рассчитано по времени между посылкой и получением.
Скорость импульса (звука) в воде более-менее постоянна. В настройках можно ввести осадку судна (для точной глубины от поверхности). Для любой глубины под трансдьюсером можно настроить предупредительный сигнал. Посылаемый звуковой сигнал имеет вид конуса, с вершиной на трансдьюсере.
Лампа дневной сигнализации
Все суда водоизмещением свыше 150 GT должны иметь лампу дневной сигнализации (судовой сигнальный прожектор, лампа Ратьера). Источник электроэнергии для нее должен быть независим от основного энергоснабжения оборудования мостика. Обычно используются простые аккумуляторные батареи.
Панель навигационных огней
В рулевой рубке должны быть сигнализация и индикаторная панель для контроля и управления навигационными огнями. В большинстве случаев рядом находится контрольная панель для сигнальных огней типа «судно, лишенное возможности управляться» (NUC, Not Under Command).

Дисплей допплеровского лага, показывающий скорость в режиме «по дну» и боковые скорости носа и кормы

Дисплей эхолота, показывающий глубину под килем
Регистратор данных рейса
Пассажирские суда и суда тоннажем более 3000 GT, построенные после 1 июля 2002 г, должны иметь регистратор данных рейса (Voyage Data Recorder, VDR, Black Box) для помощи в расследовании инцидентов. Детали можно найти в SOLAS.
Этот прибор состоит из блока сбора данных, получающего всю необходимую информацию от разных инструментов, и капсулы, где эти данные хранятся. Прибор записывает данные о курсе, скорости, коммуникации, срабатывания сигнализации, внесении каких-либо изменений, детальные сведения о работе двигателя, а также всё, что было сказано в рулевой рубке. Данные по запросу могут быть переданы на береговую базу судна.
Наподобие «черных ящиков» с самолётов, VDR даёт возможность при расследовании инцидентов восстановить порядок действий и отдаваемые команды в каждый момент времени перед происшествием и помочь установить причину инцидента.
Ящик сбора информации обычно устанавливается в рулевой рубке или рядом, капсула с данными – на крыше рулевой рубки. Она должна быть установлена так, чтобы всплыть, если судно будет тонуть. Устройство должно ежегодно проверяться специально утвержденной компанией.
Дисплей электронной карты
Вместо бумажных карт вся картографическая информация теперь отображается на компьютерном дисплее. Позиция судна также есть на экране.
Карты могут быть растровые (отсканированные бумажные карты) или векторные, полностью цифровые. Последний тип имеет существенные преимущества. Электронная карта может быть скомбинирована с АИС (AIS) и радаром, это значит, что вся информация может быть сделана видимой на экране. Обновление карт проходит в цифровом виде. Предусмотрена вторая система электронных карт (на другом компьютере) в качестве резервной. Бумажные карты тоже могут использоваться как резерв, но в этом случае они должны быть откорректированы.
Растровые карты не разрешены в «плавании без бумаг».
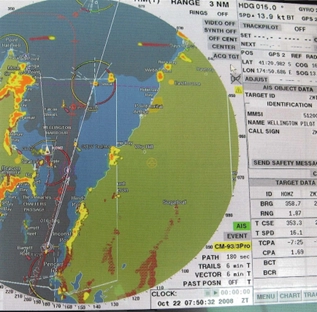
Верхний: объекты АИС на экране радара. Нижний: дисплей электронной карты того же района. Судно отображается на обоих
Глобальная морская система связи при бедствии
Глобальная система связи при бедствии и безопасности (ГМССБ/GMDSS) объединяет несколько типов оборудования на мостике для автоматической передачи сигнала бедствия в любую точку мира. Система делит моря на зоны A1–A4 по дальности связи: VHF/DSC в прибрежной зоне до 20–30 миль, MF/HF дальше, а спутниковая Inmarsat покрывает океаны. На мостике стоят VHF-радиостанции с цифровым избирательным вызовом (DSC), MF/HF передатчики для дальних зон и NAVTEX-приемник для текстовых навигационных предупреждений. При нажатии кнопки MAYDAY-DSC сигнал бедствия уходит автоматически с MMSI судна, координатами GPS и типом аварии. EPIRB (радиомаяк) активируется вручную или при затоплении, передавая позицию через спутники COSPAS-SARSAT. Все подсистемы GMDSS имеют резервное питание минимум на 3 часа (1 час на NBDP), что критично при отключении главного генератора. Ежедневные тесты оборудования и ведение логбука связи — обязательная процедура вахтенного офицера. По SOLAS Chapter IV GMDSS требуется для всех судов неограниченного плавания независимо от размера.
Смотрите также: