 +7 (812) 4-673-673
+7 (812) 4-673-673
Вычисление позиции
Приемник идентифицирует каждый спутник путем сравнения полученных кодов с данными, хранящимися в нем. Затем приемник может рассчитать положение спутников в космосе, используя орбитальную информацию, полученную в навигационном сигнале.
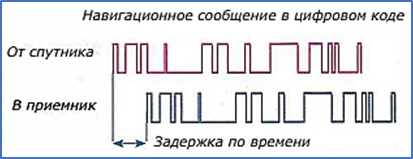
Приемник измеряет расстояние до спутника по времени, необходимому для прохождения сигнала от него до приемника (время в пути).
Это делается приемником, генерирующим точную копию кода, передаваемого спутником, которые затем сравниваются с помощью метода корреляции. Это измеряет задержку между сигналами и преобразуется в расстояние до спутника. Ошибки измерения могут возникать и включать следующие причины:
- Ошибки в спутниковых часах
- Ошибки в часах приемника
- Ошибки, вызванные задержками сигнала при его прохождении через ионосферу и тропосферу.
Приемник компенсирует ошибки в спутниковых часах и искажения ионосферы, используя математическую модель для генерации "псевдодальности". Разница между псевдодальностью и истинным расстоянием зависит от ошибок в часах приемника и любых оставшихся ионосферных эффектов.
Соображения стоимости диктуют, что часы приемника не имеют такого же качества, как атомные часы на спутниках. Эффект ошибок синхронизации приемника заключается в том, что сферы положения не пересекаются друг с другом в определенной точке. Ошибка синхронизации влияет на все измерения в одинаковой степени, поэтому приемник выполняет серию вычислений для корректировки окружностей положения, пока они, наконец, не пересекутся в определенной точке. Этот результат дает ошибку синхронизации приемника и используется в последующих вычислениях.
Приемник должен выполнить по крайней мере четыре измерения времени, чтобы определить свою собственную ошибку часов и указать одно положение в пространстве.
Пять измерений дают подтверждение положения. Еще большее количество измерений, обеспечивает значительный запас прочности при ошибках и более точное геолокацию.
Расстояние до приемника вычисляется в той же прямоугольной системе координат x, y, z, которая используется для определения положения спутников. Затем приемник преобразует исчисленное положение в широту и долготу, используя геоид WSG-84, применяемый GPS.
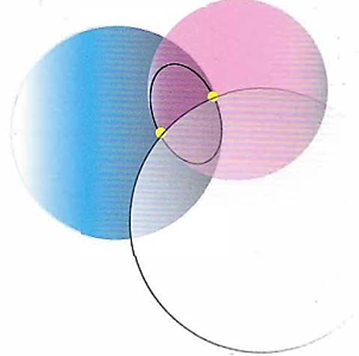
Два расстояния в пространстве дают две позиционные сферы, которые пересекаются по окружности. Третье измерение дает две позиции на этом круге, четвертое расстояние дает одну позицию
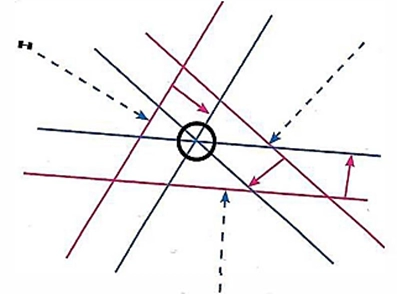
Расположите линии на поверхности земли. Математический метод повторяет все линии положения условных диапазонов в одну позицию, так как все диапазоны содержат одну и ту же ошибку (красные компоненты). Для простоты эта диаграмма построена в двух измерениях, хотя положения спутников являются трехмерными
 1. Навигационная информация
1. Навигационная информацияЦентральной функцией навигационной системы является вычисление местоположения судна, которое затем может быть нанесено на карту. Поскольку система также имеет память, процессор и часы, она может генерировать другие полезные параметры, такие как COG, SOG, более старые позиции (для отображения прошедшего пути) и вектор движения, основанный на старом положении.
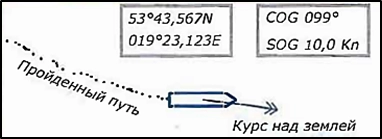
Скорость над землей (SOG) и Курс над землей (COG) рассчитываются как средние значения за определенный пользователем интервал времени
Путевую точку (WP) можно ввести, чтобы отметить позицию для изменения курса. Ввод ряда путевых точек создаст маршрут. Затем, приемник GNSS может рассчитать: расстояние, расстояние маршрута, ETA, ошибку пересечения трассы (XTE), расстояние пересечения трассы (XTD).
GNSS-набор может получить пеленг и расстояние до следующей путевой точки только в том случае, когда маршрут будет активирован.

Обычно GNSS представляет местоположение на электронной карте, что требует использования компьютера или плоттера. Когда подключение к электронной схеме установлено, могут быть введены дополнительные функции, такие как сигнализация о риске сесть на мель.
 1.1. Настройки
1.1. Настройки
Спутниковая навигационная система GPS использует описание формы Земли, которое называется WGS84 (Всемирная геодезическая система 84, или просто WGS). Среди множества настроек навигационной системы есть одна для геодезической системы и важно, чтобы эта настройка соответствовала геодезической системе, используемой обычной картой или электронной.
Существует более 100 геодезических систем со своими преимуществами и недостатками для различных мест земного шара
Чтобы получить максимальную отдачу от навигационной системы, навигатор должен ввести или, по крайней мере, проверить ряд настроек, чтобы контролировать изображение и знать, как это рассчитывается.