+7 (812) 4-673-673
+7 (812) 4-673-673
Прокладка маршрута
Навигация начинается с плана перехода от причала к причалу. Запланированный маршрут наносится на бумажную или электронную карту навигационной системы. Маршрут прокладывается с учетом осадки и высоты судна, учетом безопасного зазора от опасностей и различных других факторов, которые могут влиять на экипаж, груз, правила движения, схемы разделения и другую навигационную информацию.
Первое, что нужно иметь для навигации:
Морская информация
Лоция морей, которые предстоит пересечь. Обычно это доступно на карте или в электронной карте с дополнительной информацией о маршрутах плавания, информацией о приливах, прогнозах погоды и других источниках, например те, которые касаются правил. Вся навигационная информация должна обновляться путем исправлений.
Навигационная информация
О предстоящем маршруте «здесь и сейчас». Это результат измерений и обсерваций, выполненный навигатором: координаты, курс, отклонение от курса, скорость движения, глубина, безопасные границы параметров, и т. д.
Положение судна может быть определено одним из двух разных способов. Первый это непосредственное определение или измерение координат судна, визуально или с помощью инструментов. Вторым способом является вычисление поправок к известным координатам.
Линией положения, LOP (or Position line, PL,) называется линия на карте, вдоль которой судно расположено. Линия положения определяется в результате измерений.
|
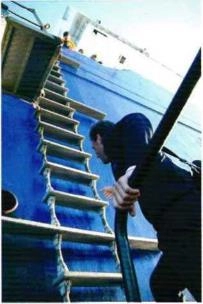
Лоцман поднимается на борт с дополнительной информацией об акватории. Фото: Морская администрация Швеции |
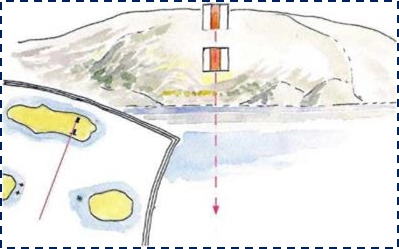
Простым и надежным способом определения места является метод переноса. Когда навигатор наблюдает за двумя объектами на одной линии, и эти объекты отмечены на карте, тогда судно располагается где-то вдоль проекции линии на карте, соединяющей объекты-линии положения. Положение судна определяется, на пересечении, как минимум двух линий положения, определенных одновременно |
1.2. Позиционирование
Любое исправление на карте − это результат как минимум двух измерений на земной поверхности, выполненные в одно время, которые в последствии наносятся на карту.
Четыре принципа определения могут быть использованы для вычисления положения судна.
- Расстояние/дистанция (термин расстояние наиболее часто используется для дальних измерений, например «Расстояние путешествия», в то время как термин дистанция используется для измерений накоротке."
- Пеленг (направление, измеренное с помощью компаса).
- Отклонение пеленга.
- Разница в расстоянии/дистанции (очень редко используемый в настоящее время метод позиционирования в гражданской навигации, соответствующие системы остались только в Китае и России.
1.3. Расстояние / дистанция
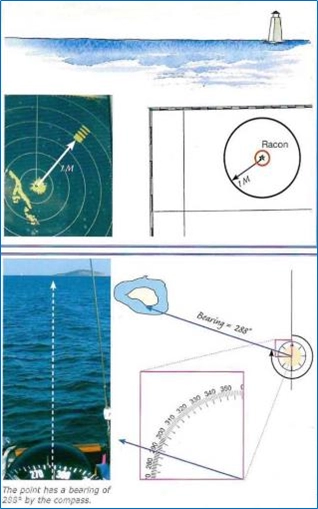
Расстояние можно оценить визуально или измерить, в частности, с помощью радара. Измерения расстояния дают круговую LOP.
Когда расстояние до объекта измеряется, например, с помощью радара, LOP будет отображаться в виде круга на карте с объектом в его центре. Так называемый Racon подает сигнал азбукой Морзе на экране радара.
Пеленг – это направление с севером в качестве ориентира, выраженное в градусах. В круге 360 °, увеличивающихся по часовой стрелке, поэтому север = 0 ° и 360 °. Пеленг измеряется компасом или радаром и наносится на карту прямой линией. Один LOP не может обеспечить положение, но, например, два одновременных пеленга, которые пересекаются, определяют положение. Для хорошего исправления необходимы 3 позиционные линии.
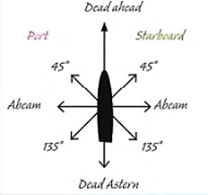
Термин относительный пеленг используется для измерения направления относительно продольной оси судна. Он используется, например, для связи между наблюдателем и штурманом.
Старый термин для пеленга 45 градусов на носу, для 135градусов – на четверти.
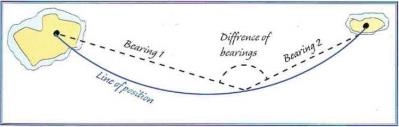
1.5. Определение места судна по двум пеленгам (Разность пеленгов)
Это угол между двумя объектами, измеренный с борта судна. Линия положения представляет собой круг, проходящий через оба объекта. Этот метод редко используют сегодня, но широко использовался прежде при проведении гидрографических работ.
Очень часто этот метод трансформируется в метод переноса, и разница пеленгов равна нулю, а линия положения представляет собой прямую на карте.

Два навигационных знака на линии их обозначение на карте
В результате угловых измерений между двумя объектами LOP представляет собой дугу окружности
 д
д
Когда навигатор наблюдает два объекта с разницей между пеленгами в 180, LOP соединяет эти объекты.
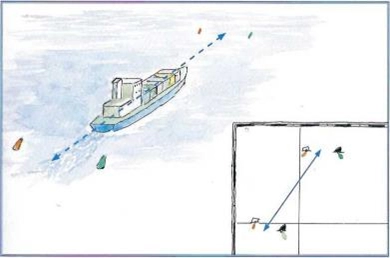
Судно может быть использовано, как прибор. Обычно на судне могут быть объекты параллельные продольной оси судна из можно использовать как средство определения направления
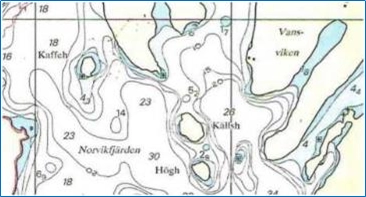
Измерение глубины с помощью эхолота покажет фактическую глубину воды под датчиком. В зависимости от топографии дна можно сделать полезный вывод о своем положении.

|
Несмотря на то, что никто сейчас |
Глубины и их отображение на картах |
1.7. Точность определения
Местоположение судна, определение в результате обсервации, отмечается на карте как пересечение двух линий положения, наблюдаемых одновременно.
В открытом океане не требуется высокая степень точности определения позиции судна, круг радиусом в милю может оказаться вполне адекватным. Вместо этого преобладают погодные условия и экономия топлива.
В прибрежных водах близость к опасностям требует более высокой точности позиционирования. Положение судна на карте условно обозначается кружком, размер которого отражает точность наблюдений.
В ограниченных водах, таких как архипелаги, реки и порты, потребность в точности очень высока. Но позиция не всегда должна быть отмечена точкой. В зависимости от ситуации, линия, такая как пеленг на два створа, сектор или просто знание того, что судно находится за пределами запретной зоны, может быть достаточно.
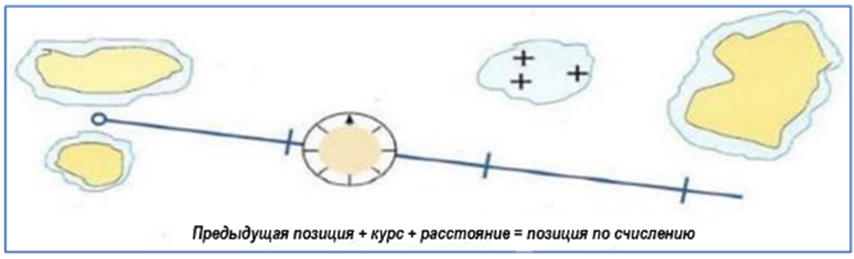
Расчет нового местоположения из известного местоположения путем нанесения среднего курса (пройденного направления) в соответствии с компасом и пройденного расстояния на журнале (пройденное расстояние) называется точным счислением (DR). Расчетная позиция (EP) − это позиция DR, которая была скорректирована с учетом запаса хода, приливов и дрейфа.