 +7 (812) 4-673-673
+7 (812) 4-673-673
Эхолот

Эхолот
Эхолот является полезным навигационным средством. Он передает импульсы ультразвука (>20000 Гц) и измеряет период, который проходит до того, как датчик регистрирует эхо от морского дна. Скорость звука в воде зависит от солености, температуры и глубины, но эхолоты для навигации обычно калибруются до 1500 м/сек. Полученное измерение глубины может быть отображено в цифровом виде или на экране в виде профиля морского дна. Получаемые данные, старыми моделями, выводились на бумагу, но сегодня результат отображается сразу на экран с возможностью его распечатки.
Существует три типа датчиков эхолота: магнитострикционные, электрострикционные и пьезоэлектрические. Общим для всех трех является то, что материал, находящийся в контакте с водой, вибрирует, пропуская переменный ток через материал. Вибрации создают звуковые волны, которые отражаются от морского дна. Когда отраженный сигнал возвращается к датчику, происходит обратный процесс − вибрации создают импульс тока, который отправляется в процессор эхолота и измеряется время его прохождение.
Длительность импульса и интервал изменяются автоматически в зависимости от выбранной шкалы глубины. Большие глубины требуют больше энергии и большего времени для прохождения сигнала.
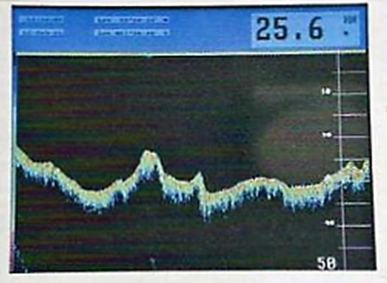

Эхолоты показывают как фактическую глубину в цифровом представлении, так и профиль морского дна

Конусообразная волна передачи (ширина импульса) обычно имеет наклонный угол 15°−25°. Частота, размер датчика и длительность импульса влияют друг на друга, что требует согласования.
Кроме того, эхолот может отображать:
- Индикатор направления изменения глубины, отображаемый в виде вертикальной или перевернутой стрелки.
- Наблюдаемые максимальная и минимальная глубины.
В практической навигации эхолот можно рассматривать как независимый прибор, способный подтвердить или оспорить положение, определенное другим прибором.
Настройки
- Различные единицы измерения глубины: футы, сажени или метры.
- Сигнализация при мелководье или при превышении наибольшей глубины.
- Демпфирование цифрового дисплея
- Выбор плоскости отсчета глубины: глубина ниже киля, глубина ниже датчика или глубина от уровня моря.
- Длительность импульса и коэффициент усиления можно регулировать на некоторых эхолотах.

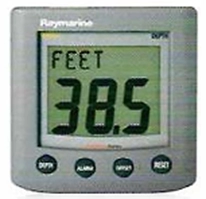
Цифровой эхолот с включенной сигнализацией на конкретную глубину (SHA = наименьшая глубина).
Поскольку звуковой импульс описывает форму конуса, первое зарегистрированное эхо не всегда исходит непосредственно из-под судна.
Изменение скорости звука, которое может произойти, не является большой проблемой для навигации, но при точном измерении обычно применяется поправочный коэффициент.
Выбор подходящей чувствительности для использования в эхолотах с цифровым отображением, зависит от производителей. Навигатор лучше понимает изображение, когда оно выводится на экран, чтобы, например, различать мягкое дно, косяк рыбы или водоросли. Но эхолоты с цифровым дисплеем могут показывать только одно значение и то, каким оно будет, определяется программой. .
Ошибки могут включать влияние слоев с разной температурой и соленостью воды или высотой донной растительности, что приводит к занижению глубины.
Расположение датчика способно повлиять на функцию эхо-зондирования. Пузырьки воздуха могут отражать часть энергии от датчика. Они образуются из-за носовой волны или неровностей корпуса.

Цифровые эхолоты запрограммированы так, чтобы показывать "правильное" эхо, а не косяки рыбы или слои воды
Требования ИМО к точности эхолотов:
Исходя из скорости звука в воде 1500 метров в секунду, допустимый допуск на указанной глубине должен составлять: либо ±1 метр по шкале мелкого диапазона, ±5 метров по шкале глубокого диапазона, либо ±5 процентов от указанной глубины, в зависимости от того, что больше.
Производительность оборудования должна быть такой, чтобы оно соответствовало требованиям рекомендаций: при качке судна ±10° и/или килевой качке ±5°.
Сонар (гидролокатор) − это эхолот, распространение звука которого, может быть направлено непрямо вниз. Активные гидроакустические преобразователи излучают акустический сигнал в воду. Объекты на пути звукового импульса будут возвращать "эхо" на гидролокаторный преобразователь. Сонар определяет дальность и ориентацию объекта, определяя время между излучением и приемом звуковых импульсов. Сонары бокового сканирования буксируются за судном и передают полезную информацию для съемки.
Рыбаки часто используют гидролокаторное оборудование в поисках рыбы.
Сонар с передним обзором может использоваться во время маневров в гавани и на якоре. Он передает прямо вперед и вниз в узком секторе и результат отображается на экране в виде профиля.