 +7 (812) 4-673-673
+7 (812) 4-673-673
Динамическое позиционирование
Этот раздел относится к специальным судам, которые должны во время работы сохранять свою позицию без использования якорей или других устройств, крепящих судно к морскому дну.
Суда с динамическим позиционированием (ДП) включают плавучие краны, суда для прокладки кабеля и трубопроводов, для рытья траншей под трубы, камнеукладчики, суда водолазной поддержки, суда-дночерпатели и даже бункеровочные суда, большие яхты и, в последнее время, пассажирские суда при посещении экзотических мест.
Подобные системы, известные как «авто-плавание» (auto-sail) или автотрекер, также используются для управления судном при движении из одной точки в другую, и когда в данном месте запрещено бросать якорь. Всё больше и больше судов оснащаются такими системами управления.

На рисунке показаны индивидуальные консоли управления трастерами на плавучем кране и трубоукладочной барже. Эти органы управления не для самих операций ДП (потому что это почти невозможно для оператора вручную управлять судном при динамическом позиционировании), а для процедур тестирования отдельных трастеров. В центре консоли – комбинированное устройство управления, позволяющее управлять сразу всеми трастерами для общего эффекта по направлению и силе.
Основные критерии проектирования – ЧТО, ГДЕ И КАК – очень важны для применения ДП.
1. Нотации для ДП
Резервирование для судов с ДП обычно описываются как Класс 1, 2 или 3.
Класс 1 – для простой работы с единственной системой автоматического управления, имеющей запасное ручное управление, когда потеря позиции не приведет к критической ситуации. Это может быть морское резервное судно, яхта или, возможно, пассажирское судно, стоящее в определенной позиции, с людьми на мостике.
Класс 2 – для более сложной работы с продублированной автоматической системой управления, когда потеря позиции может привести к более критической ситуации. Примеры – суда-кабелеукладчики, трубоукладчики, суда для рытья траншей или суда-камнеукладчики.
Для системы управления и тяги, управляемой системой, требуется FMEA (Failure Mode and Effect Analysis, анализ видов и последствий отказов). Должен рассматриваться единичный отказ (авария), такой как пожар и (или) затопление отсека. Нотация (АА).
Класс 3 – самый высокий класс резервирования и используется на высокотехнологичных глубоководных судах-трубоукладчиках, судах для подъёма больших грузов или водолазных судов, где потеря управления может привести к опасной ситуации. Для системы управления и системы тяги требуется FMEA, основанный на единичном отказе. Также рассматривается затопление и/или пожар. Нотация (ААА) или DP3.
Когда в FMEA рассматривается затопление и пожар, жизненно важно, как проложен кабель от продублированной системы управления к трастерам и другому управляемому оборудованию.
2. Расположение системы ДП
Система ДП построена из оборудования (металлоконструкций), таких как винты или трастеры, где усилие и направление управляются компьютерами. Они получают информацию от различных датчиков, учитывая ветер, позицию, курс, скорость и т.д.
В зависимости от Классификации системы ДП, резервирование обеспечивается количеством и мощностью трастеров, компьютеров и датчиков на входе. Компьютеры обрабатывают входящую информацию и преобразовывают её в команды трастерам. В результате судно может оставаться на месте или двигаться по определённому курсу и на определённое расстояние.
Систему можно использовать для плавания вдоль заданной траектории с путевыми точками. Это обычно применяется для операции по укладке кабеля, которая может проводиться на скоростях до 10 узлов.
Важная часть системы ДП – система управления мощностью (PMS, Power Management System). Эта система управляет генерацией и распределением электричества. В период проектирования проводятся специальные расчеты рабочей нагрузки, включая потоки мощности, вопросы селективности и конфигурации распределительного щита, например закрытые или открытые шиносоединительные выключатели.
Разработчики системы ДП будут использовать полученные данные для расчета мощности системы ДП судна и создания так называемого DP-footprint. DP-footprint показывает операционные пределы судна с ДП по отношению к внешним условиям, таким как течение и ветер, и к имеющейся тяге (прим. перев.: авторы здесь ошибочно используют термин DP Footprint (Plot) вместо DP Capability Plot).
Резервирование часто определяется через FMEA (Failure Mode and Effect Analysis, анализ видов и последствий отказов), который требуется для всех судов с высокой ДП нотацией.
Этот анализ рассматривает не только систему управления, но всё оборудование, электрическое или нет, требуемое для удержания судна в позиции или работы систем auto-sail или автотрекера, как определено в первом правиле проектирования – «ЧТО».
3. Датчики для ДП
Эти датчики состоят из:
3.1. Гирокомпасы
Два или больше гирокомпасов определяют курс судна
3.2. Датчики вертикальных перемещений
Два или больше датчика, которые определяют крен (roll, бортовая качка) и дифферент (pitch, килевая качка) судна.
3.3. Скорость и направление ветра
Два или больше датчика, измеряющих скорость и направления ветра, позволяют системе ДП реагировать на усиление и порывы ветра до того, как судно начнёт двигаться.
3.4. Системы DGPS
Две или больше системы DGPS определяют позицию судна. Кроме того, если судно движется, вычисляются истинный курс и скорость. Также должно быть два или больше дифференциальных приемника для сигнала коррекции GPS.
3.5. Натянутый трос
Система с натянутым тросом – это обычно лебедка с самонатяжением, со стальным тросом, прикрепленным к грузу на дне. Трос находится под постоянным натяжением. Он проходит через карданный подвес с измерительным блоком, собирающим данные о направленном угле троса (вертикальном и горизонтальном). Таким образом определяется относительное смещение судна.
Компьютер вычисляет это движение по измеренным углам, с поправкой на отклонение самого судна от вертикали по датчикам вертикальных перемещений (качка), и измеренной длины троса или глубины места.
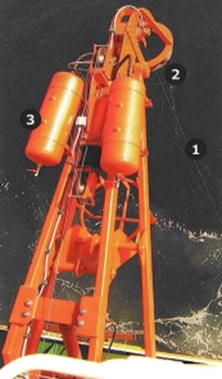
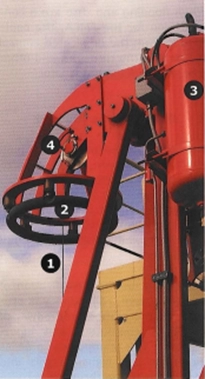
3. Компенсатор вертикальной качки
4. Угловой сенсор для измерения поперечного перемещения судна.
3.6. Системы позиционирования на основе радаров
Другая система референсного (опирающегося на референсные, базовые точки) позиционирования – ARTEMIS: радарная система измеряет расстояние и направление на одну или большее количество передающих станций с известным местоположением.
3.7. Лазерные системы
Более современная надводная система – FANBEAM, лазерная система, измеряющая расстояние и направление на отражатель с известным местоположением. Иногда эта система реагирует даже на отражатели в защитных чехлах.
3.8. Подводные системы позиционирования
Под водой системы позиционирования используют гидролокаторы, или сонары, реагирующие на расположенные на морском дне транспондеры (приемопередатчики). Транспондеры отвечают на звуковые сигналы, излученные судном, и, опять же, измеряется расстояние и направление.
4. Расположение датчиков
Для точных систем все относительные расстояния между антеннами DGPS, позициями натянутых тросов, лазерными установками и антеннами гидролокаторов должны быть известны и занесены в компьютерную систему. Сигналы, входящие в компьютер, должны быть скорректированы на эти постоянные смещения (офсеты). Изменения величин, результат движения судна, также будут откорректированы в компьютере.
Как пример, система будет пытаться удержать антенну DGPS в фиксированном положении. Бортовая качка судна будет менять положение антенны и, если оно не будет скорректировано, трастеры будут активироваться. То же самое произойдёт, если оператор перейдёт с одной системы DGPS на другую, если система не будет знать офсеты антенн.
Местоположение (точка) на судне, которое нужно удерживать неподвижным системой ДП, может быть выбрано в зависимости от вида работ. В зависимости от вида работ и расположение оборудования для этих работ на борту судна, могут быть определены и офсеты для этого оборудования. Для судна-камнеукладчика таким важным местом может быть конец укладочной трубы (fallpipe), а для плавучего крана – позиция крюка.

Плавучий кран с ДП готовится поднять верхнюю часть конструкции платформы с полупогружного судна для перевозки сверхтяжелых грузов
5. Расположение и типы движителей
Различное применение определяет различное расположение и типы движителей. Термин «движитель» выбран для обозначения разнообразных трастеров, таких как:
- поворотный трастер с переменной скоростью вращения и нерегулируемым винтом.
Оба этих типа также доступны как азимутальные трастеры, где направление трастера может изменяться. В свою очередь, азимутальные трастеры могут быть фиксированными и выдвижными.
Используются как реверсивные туннельные трастеры с фиксированным шагом винта и переменной скоростью, так и туннельные трастеры с ВРШ и постоянной скоростью вращения. Трастеры могут быть дизельными или дизель-электрическими, с одним или несколькими генераторами.