 +7 (812) 4-673-673
+7 (812) 4-673-673
Системы динамического позиционирования судна
Содержание:
- Основные функции и задачи системы динамического позиционирования
- Структура и основные компоненты
- Принцип работы системы
- Типы и классификация систем
- Требования и нормативные документы
- Проверка и обслуживание
- Современные технологии и перспективы развития
Система динамического позиционирования (СДП) — комплекс инженерного оборудования поддерживающий позицию судна с необходимой точностью даже в штормовых условиях не прибегая к якорю или швартовым. Рожденная в 1960-х как ответ на вызовы нефтегазовой разведки, она эволюционировала от примитивных механических регуляторов до цифровых комплексов. Сегодня 78% глубоководных буровых платформ зависят от ДП-систем класса DP-3, где отказ даже двух водонепроницаемых отсеков не нарушит позиционирование.

Первый успешный тест состоялся в 1961 году на судне Eureka, оборудованном аналоговым компьютером и гидравлическими подруливателями. Но настоящую революцию совершила норвежская компания Kongsberg, внедрившая в 1980-х трехконтурные системы с GPS-коррекцией, которые до сих пор доминируют на судах-трубоукладчиках типа Solitaire с длиной корпуса 300+ метров.

Без динамического позиционирования немыслимы проекты вроде Nord Stream 2 — трубоукладчик Академик Черский использовал гибридную систему NavDP 4000, комбинируя данные с 12 гироскопов и 3 гидролокаторов. А рынок ДП-решений, достигший $81 млрд в 2023 году, к 2032-му удвоится, подпитываемый спросом на ветроэнергетические платформы и подводные дроны.
Основные функции и задачи системы динамического позиционирования
Точное удержание позиции и курса.
Судно, оснащенное СДП, сохраняет положение с погрешностью до десятков сантиметров даже в условиях сильного волнения. Буровые суда и трубоукладчики ежедневно выполняют операции, где отклонение от точки грозит многомиллионными убытками или авариями.
Маневрирование без якорей и швартов.
Система работает на глубинах, где традиционные методы крепления невозможны или опасны. Это важно для судов снабжения, водолазных платформ, кабелеукладчиков и земснарядов, которые действуют в районах с плотной инфраструктурой морского дна или вблизи сооружений.
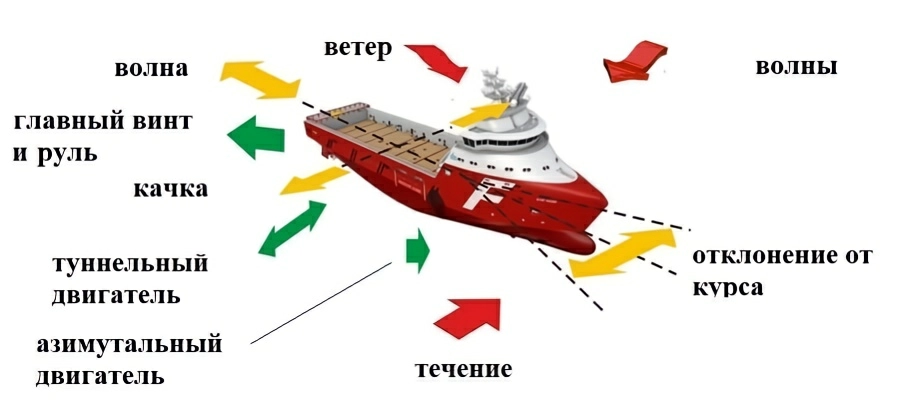
Компенсация внешних воздействий.
Система анализирует данные от гирокомпасов, анемометров, GPS и гидроакустики, вычисляет суммарный вектор возмущающих сил и мгновенно корректирует обороты движителей. Учитывается не только ветер и течение, но и такие «невидимые» факторы, как изменение плотности воды или локальные возмущения, вызванные соседними судами.

На трубоукладочной барже Pioneering Spirit установлена система ДП, способная удерживать гигантское судно длиной 382 метра в пределах 0,5 метра от заданной точки даже при ветре 20 м/с и волнении до 4 метров. Для удержания позиции используют комплексную систему с лазерными и гидроакустическими датчиками.
Автоматизация сложных операций.
ДП берет на себя управление судном при выполнении операций, требующих максимальной точности: бурение, укладка труб, монтаж подводных конструкций. При строительстве морских ветропарков или прокладке межконтинентальных кабелей система обеспечивает непрерывное следование по заданной траектории с минимальными отклонениями.
Гибкость и безопасность.
В случае аварийной ситуации, динамическое позиционирование позволяет мгновенно изменить позицию или курс, обеспечивая быстрое отступление от опасной зоны. Это ценно в районах с интенсивным судоходством или сложной подводной инфраструктурой.
Структура и принцип работы системы динамического позиционирования
Удержание в заданной точке достигают за счет активного использования движителей, подруливающих устройств и интеллектуальных управляющих систем, которые мгновенно реагируют на малейшие изменения внешней среды. Рассмотрим подробно ключевые компоненты и логику системы.
1. Система позиционирования и сенсоры
В основе лежит точное определение текущего положения судна относительно заданной точки. Для этого используют несколько взаимодополняющих технологий:
DGPS (Дифференциальная глобальная система позиционирования) — обеспечивает точность до 10 см благодаря корректирующим сигналам от наземных станций. На судах обычно устанавливают два и более DGPS-приемника для надежности и контроля ошибок.
Гирокомпасы — определяют точный курс, необходимый для расчета направления коррекции движителей.
Датчики вертикальных перемещений (Motion Reference Units, MRU) — измеряют крен, дифферент и качку, для учета динамики судна при корректировках.
Анемометры — измеряют скорость и направление ветра, для предугадывания и компенсации влияния порывов.
Гидроакустические системы — применяют для подводного позиционирования, в условиях, где GPS сигнал нестабилен (вблизи платформ или в узких проливах).
Дополнительные датчики — лазерные дальномеры, радиолокация (РЛС), оптическое позиционирование, и т.д.
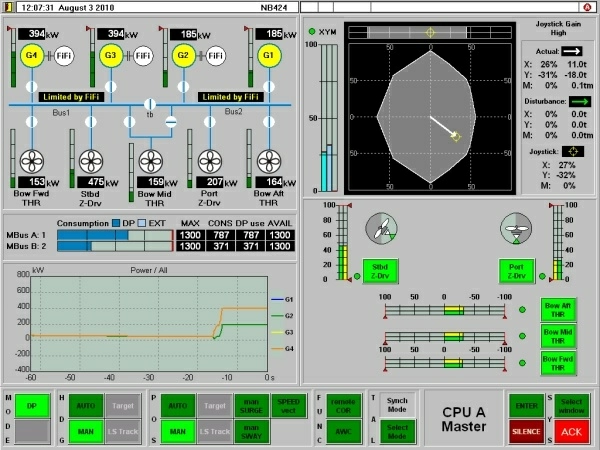
2. Система управления динамическим позиционированием
Вычислительный комплекс — компьютер с программным обеспечением, которое:
- Обрабатывает данные с сенсоров.
- Вычисляет суммарные силы и моменты, действующие на судно (ветер, течение, волны).
- Рассчитывает необходимые управляющие воздействия на движители для компенсации этих сил.
- Контролирует работу всех исполнительных механизмов в режиме реального времени.

Оператор взаимодействует с системой через пульты управления (консоли), где может задавать параметры позиции, курса и режимы работы. Современные системы поддерживают автоматическое и полуавтоматическое управление, а также ручное вмешательство при экстренных ситуациях.
3. Судовые движители и подруливающие устройства
Для реализации управляющих воздействий используют:
Главные движители — регулируемые по шагу винты, винторулевые колонки (азимутальные движители), крыльчатые движители. Они обеспечивают противодействие возмущению и маневренность.
Подруливающие устройства (ТПУ) — компактные движители, расположенные в носовой и кормовой частях, обеспечивают точную коррекцию положения и курса.

Системы управления движителями — электроника, обеспечивающая синхронизацию и точное выполнение команд от центрального компьютера ДП.
4. Электроснабжение
Стабильное и бесперебойное питание — залог надежной работы. Система электроснабжения включает:
- Генераторы и первичные источники энергии.
- Распределительные щиты и кабельные сети.
- Стабилизаторы напряжения.
- Аккумуляторы для обеспечения при авариях или сбоях.
- Резервирование ключевых элементов электросети для повышения отказоустойчивости.
На буровых судах класса DP-3, для сохранения позиции даже при затоплении, есть обязательные требования:
- тройное резервирование всех компонентов;
- отделенная часть системы электропитания за огнестойкой (класса A.60) и водонепроницаемой переборкой.
Принцип работы системы
Работа строится по циклу:
- Сенсоры непрерывно измеряют положение, курс, крен, скорость и направление ветра, а также другие параметры.
- Компьютер анализирует эти данные, вычисляет силы, сдвигающие судно с заданной позиции.
- На основе математических моделей и алгоритмов управления формируются управляющие команды для движителей.
- Движители создают упор и моменты, компенсирующие внешние воздействия, удерживая судно на месте или обеспечивая движение по заданной траектории.
- Цикл повторяется с частотой до нескольких раз в секунду, обеспечивая динамическую адаптацию к изменяющимся условиям.
Внедрение адаптивных алгоритмов и искусственного интеллекта позволяет прогнозировать поведение судна и минимизировать расход топлива при удержании позиции.
Типы и классификация
Судовые системы позиционирования классифицируют по уровню надежности и отказоустойчивости. Международная морская организация (IMO) и ведущие классификационные общества выделяют три основных класса:
Класс 1 (DP1) — базовый уровень отказоустойчивости. Не имеет избыточности, при любой единичной неисправности (отказ одного движителя, сенсора или блока управления) судно может потерять позицию. Применяют на судах с относительно низкими требованиями, где риск потери позиции не критичен или компенсируется.
Класс 2 (DP2) — повышенная надежность за счет избыточности. Система с избыточностью, выдерживает отказ любого одного активного компонента без потери позиции. Включает движители, сенсоры, компьютеры управления и коммуникационные линии. Резервирование всех критически важных элементов, что обеспечивает непрерывность работы даже при сбоях.
Класс 3 (DP3) — максимальная отказоустойчивость и безопасность DP3. Защита от отказов не только активных, но и пассивных компонентов, включая полное затопление или пожар в одном из водонепроницаемых отсеков. Системы класса 3 имеют физическое разделение на независимые блоки, расположенные в разных противопожарных и водонепроницаемых зонах.
Классы закреплены в Правилах классификации и постройки морских судов Российского морского регистра судоходства (РМРС) и соответствуют международным требованиям. Более подробно о классах читайте в статье "Классификация судов, оснащенных системами динамического позиционирования".
Дополнительные типы и классификации
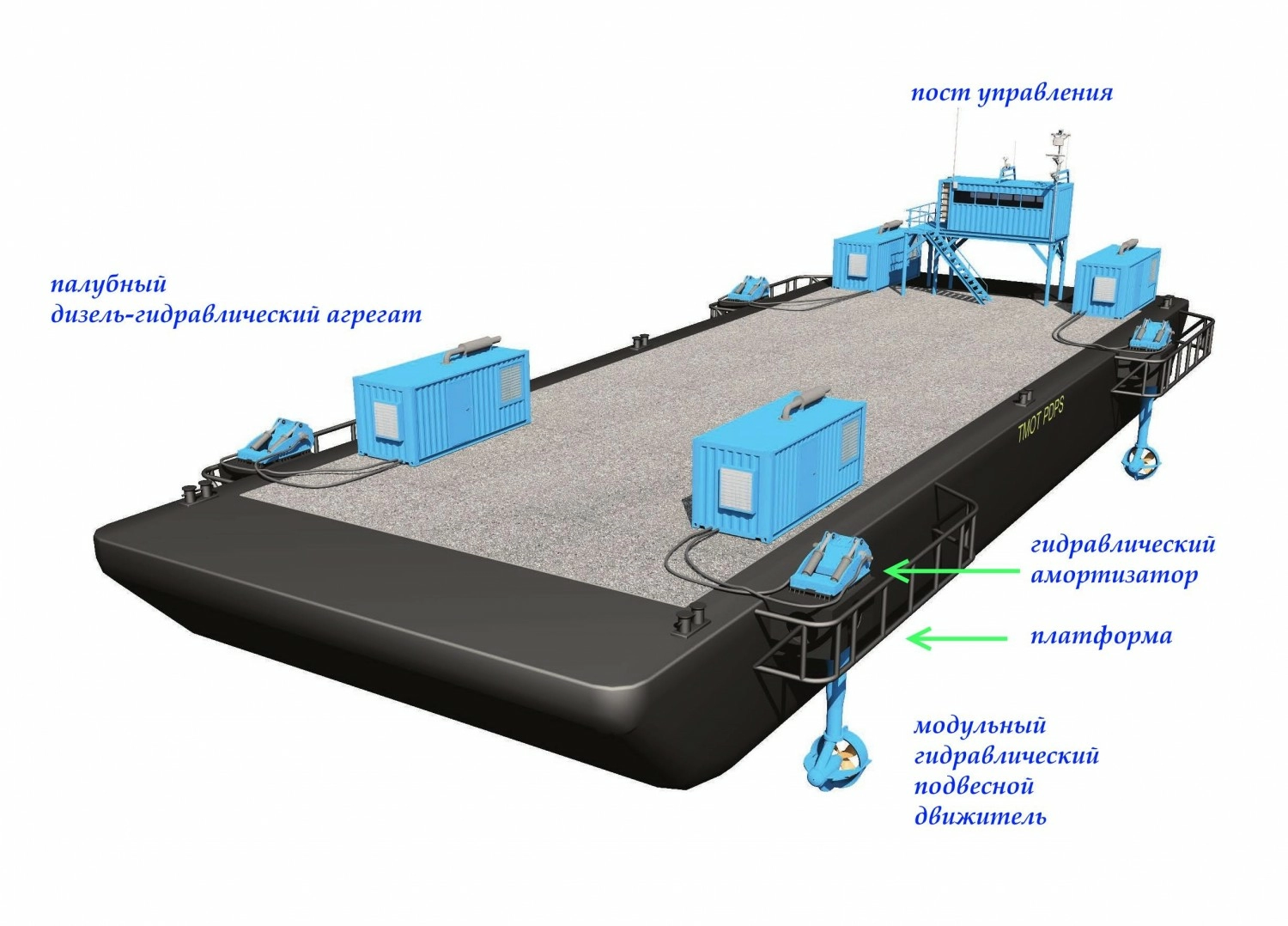
Помимо классов по надежности, системы динамического позиционирования классифицируют на стационарные и портативные. Стационарные — интегрированы в конструкцию судна, обеспечивают полный контроль и автоматизацию, а портативные — модульные, могут устанавливаться на разные суда для временных задач.
Требуемые классы надежности:
- Буровые суда и платформы — требуют максимальной точности и отказоустойчивости (DP2 и DP3).
- Суда снабжения (OSV, PSV) — обычно оснащают DP1 или DP2 в зависимости от задач.
- Водолазные суда (DSV) — особые требования к безопасности водолазных операций, часто DP2.
- Трубоукладчики и кабелеукладчики — высокие требования к точности и плавности движения, DP2 и DP3.
Требования и нормативные документы по системам динамического позиционирования (ДП)
Для гарантии безопасности на судне, отказоустойчивости и стабильной работы системы, разработаны строгие международные и национальные нормативы по проектированию, монтажу и эксплуатации систем динамического позиционирования.
Международные руководства и стандарты
Главным документом, в котором прописаны все требования к системам динамического позиционирования является циркуляр ИМО MSC.1/Circ.1580 «Guidelines for Vessels and Units with Dynamic Positioning (DP) Systems». В нем указаны все необходимые требования по резервированию оборудования, обеспечению отказоустойчивости и безопасности при эксплуатации в сложных условиях.
Национальные стандарты и рекомендации
В России дополнительно действует ряд документов, в которых указаны требования к системам динамического позиционирования. В РД 51-10-98 «Организация службы динамического позиционирования на судах РАО "Газпром"» прописаны требования к квалификации персонала, процедурам эксплуатации и техническому обслуживанию. В «Руководстве по расчету диаграмм удержания судов с системами динамического позиционирования» прописаны правила проектирования СДП. Российский морской регистр судоходства (РМРС) выдает классификационные знаки DYNPOS-1, DYNPOS-2 и DYNPOS-3, подтверждающие соответствие установленным стандартам.

Буровые суда и полупогружные платформы, такие как Deepwater Horizon, оснащены системами DP3. Позиция сохраняется при серьезных авариях благодаря полныму резервированию компонентов и водонепроницаемым огнестойким отсекам.
Также у РМРС есть требования:
Пояснительная записка и проектная документация. Для судов с классами DYNPOS-2 и DYNPOS-3 обязательна пояснительная записка, в которой подробно описывают концепцию построения системы, степень резервирования и обоснование отказоустойчивости при наихудших сценариях отказа.
Чертежи и схемы. Необходимы подробные схемы расположения оборудования, включая пропульсивные механизмы, щиты управления, пульты оператора, системы позиционирования и датчики внешних воздействий.
Электроэнергетическая система. Обеспечивает бесперебойное питание всех компонентов с резервированием ключевых узлов, чтобы исключить потерю позиции из-за сбоев электроснабжения.
Испытания и сертификация. Перед вводом в эксплуатацию система динамического позиционирования проходит комплексные испытания, включая тесты на отказоустойчивость, проверку в аварийных режимах и соответствие требованиям класса.
Проверка и обслуживание системы динамического позиционирования
Регулярная проверка и квалифицированное обслуживание обеспечивают стабильность, точность и отказоустойчивость, предотвращая аварийные ситуации и простои. Рассмотрим ключевые аспекты этой важной задачи.
1. Регулярные проверки и испытания
Проверки проводят на регулярной основе, чтобы выявлять скрытые неисправности и подтверждать соответствие нормативным требованиям. Выделяют несколько видов проверок:
Проверка перед началом работ. Перед началом работы с системой динамического позиционирования необходимо провести испытания всех компонентов (датчиков положения, гирокомпасов, анемометров, DGPS, исполнительных механизмов и энергетической установки), а также трехчасовое тестирование удержания позиции и курса судна в автоматическом режиме с моделированием отказов для проверки резервирования и отказоустойчивости системы.
Ежедневные проверки. Включают визуальный осмотр оборудования, проверку показаний датчиков, тестирование связи между компонентами и контроль параметров электропитания.
Еженедельные проверки. Предполагают более глубокий анализ работы, тестирование резервных каналов и проверку работоспособности аварийной сигнализации.
Ежемесячные проверки. Включают калибровку датчиков, тестирование движителей и проверку соответствия фактических характеристик системы проектным значениям. Периодические освидетельствования. Проводят классификационными обществами (например, РМРС) и включают полный комплекс испытаний, включая анализ FMEA (Failure Mode and Effects Analysis) и проверку соответствия требованиям класса DYNPOS.
2. Техническое обслуживание
Техническое обслуживание системы включает комплекс работ по поддержанию оборудования в исправном состоянии и продлению срока его службы:
| Обслуживание движителей | Проверка состояния винтов, подшипников, уплотнений и гидравлических систем, замена масла и фильтров |
| Обслуживание датчиков | Очистка, калибровка и замена датчиков положения, курса, ветра и других параметров |
| Обслуживание электрооборудования | Проверка состояния кабелей, разъемов, щитов управления и источников питания, замена изношенных компонентов |
| Обслуживание программного обеспечения | Обновление версий, установка патчей безопасности, проверка целостности данных |
3. Анализ FMEA и выявление скрытых неисправностей
FMEA (анализ видов и последствий отказов) — это систематический процесс выявления потенциальных неисправностей и оценке их влияния на безопасность и работоспособность. Результаты FMEA используют для разработки планов технического обслуживания, процедур аварийного реагирования и мер по снижению рисков.

- Непрерывный мониторинг. Отслеживание состояния каналов передачи данных и статуса оборудования.
- Периодическое тестирование. Запуск программ для проверки работоспособности резервных компонентов и систем.
- Анализ данных. Сравнение фактических параметров работы системы с эталонными значениями.
4. Квалификация персонала
Обслуживание системы требует высокой квалификации и опыта от технического персонала. Инженеры и электромеханики проходят обучение и сертификацию у производителей оборудования или в специализированных учебных центрах.
IMCA (International Marine Contractors Association) рекомендует, чтобы судовой персонал, ответственный за обслуживание СДП, проходил курсы DP Maintenance, в которых разобраны особенности работы с конкретным оборудованием
Современные технологии и перспективы развития систем динамического позиционирования
В последние годы развитие СДП идет семимильными шагами, отвечая на вызовы сложных морских операций и растущих требований к точности, безопасности и энергоэффективности.
Интеллектуальные алгоритмы и адаптивное управление
Современные системы все активнее используют методы искусственного интеллекта и машинного обучения. Такие алгоритмы анализируют огромный массив данных в реальном времени, предсказывать поведение судна и окружающей среды, а затем корректировать работу движителей.
Например, внедряют адаптивные контроллеры, которые подстраиваются под динамику судна и изменяющиеся условия, снижая расход топлива и повышая точность удержания позиции. Это важно для длительных операций на шельфе, где экономия энергии влияет на себестоимость проекта.
Многоуровневые системы датчиков и интеграция данных
Современные системы динамического позиционирования оснащены высокоточными сенсорами: DGPS с коррекцией, лазерными дальномерами, гидроакустическими системами, инерциальными датчиками и анемометрами. Интеграция полученных данных создает более точную и устойчивую картину положения судна. Российский морской регистр судоходства разработал руководство по расчету диаграмм удержания судов с СДП, что стало важным шагом для оценки и оптимизации систем для различных условий. Диаграммы удержания позволяют проектантам и операторам объективно оценивать способность судна сохранять позицию при воздействии ветра, волн и течений, а также в аварийных ситуациях.
Новые режимы работы и расширение функционала
Современные системы не ограничиваются удержанием позиции — при работе с подводными роботами (ROV) и в гидрографических исследованиях, они поддерживают сложные режимы слежения за целью (follow target mode). В этом режиме судно автоматически следует за движущимся объектом, обеспечивая стабильность и безопасность операций.
Альтернативные режимы для дноуглубительных судов (земснарядов), удерживают позицию с учетом особенностей работы в мелководье и при больших нагрузках.
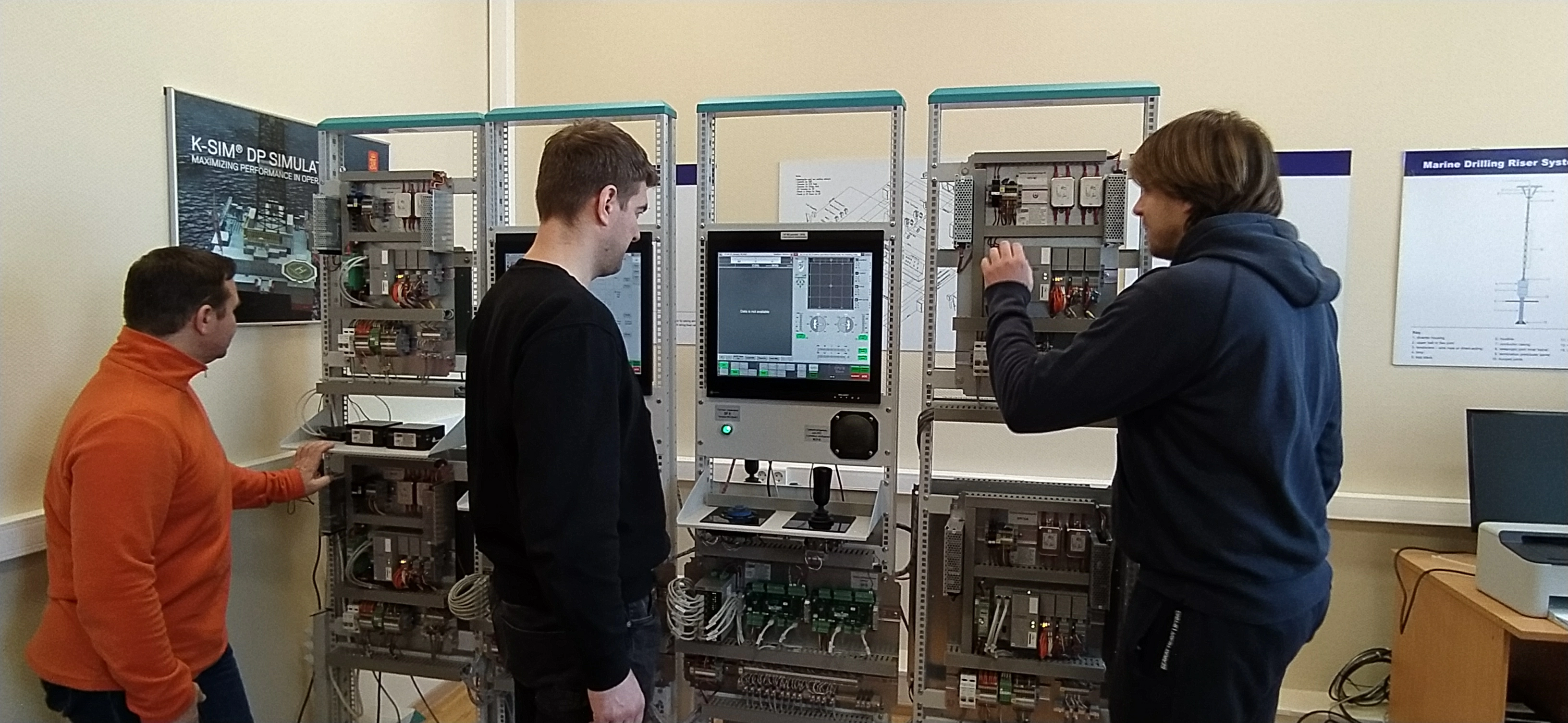
Обучение и подготовка операторов
Технологический прогресс требует и повышения квалификации персонала. Морской учебно-тренажерный центр ГУМРФ имени адмирала С.О. Макарова (с тренажерами от Kongsberg и NAVIS, аккредитованными The Nautical Institute) позволяет операторам на берегу отрабатывать навыки управления СДП в различных сценариях, что существенно снижает риски при реальных морских операциях.
Перспективы развития
В ближайшие годы ожидают рост внедрения автономных систем управления. Совместно с Российским морским регистром судоходства создаются онлайн-сервисы для расчета диаграмм удержания. Проектанты, судовладельцы и операторы получают оперативные данные и рекомендации для эффективной эксплуатации. Разработка новых алгоритмов и оптимизация работы движителей направлены на снижение энергопотребления и уменьшение углеродного следа судов.
https://b24-oiffn3.bitrix24.site/zayavka-avtomatica/