 +7 (812) 4-673-673
+7 (812) 4-673-673
Лаг
Скорость может быть измерена относительно воды, окружающей судно, Скорости по воде (STW) или относительно морского дна, Скорости над землей (SOG).
Во время маневров в гавани необходимо знать скорость судна во всех направлениях, спереди или сзади, а также боковую скорость носа и кормы. Датчики регистрации с двумя осями могут выдавать эту информацию (система причаливания).
 Скорость в узлах "по воде" в данный момент времени
Скорость в узлах "по воде" в данный момент времени
Знание дистанции пробега всегда было фундаментальной информацией для ответственной навигации − и остается таковой до сих пор. В некоторых журналах также отображается расстояние поездки.
Журнал также может давать информацию о любой тенденции к увеличению или уменьшению скорости.
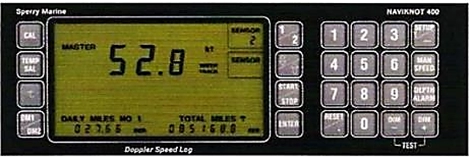


Маленькая вертикальная стрелка указывает на то, что скорость увеличивается
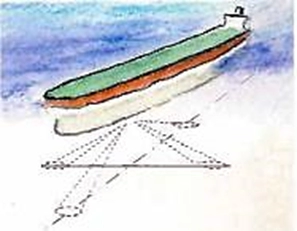
Морская единица измерения "узел" происходит от старого способа измерения скорости с использованием "щепка-брусок". Его функция состоит в том, чтобы измерить, как далеко судно проходит по воде в течение фиксированного промежутка времени, обычно 30 секунд. Треугольный фрагмент доски, прикрепленный к деревянному брусу, выбрасывается за борт. Груз на нижнем крае заставляет треугольник принимать вертикальную позицию в воде. Таким образом, он становится почти неподвижен и ход судна приводит к вытягиванию лаглиня (тонкая бечёвка) с катушки: больше лаглиня = более высокая скорость. Лаглинь отмечен через равные промежутки узлами на нем – отсюда выражение "узел"(Kts − knot).
Чтобы предотвратить помехи от кильватера судна и ветра, перед началом измерения допускался длинный лаглинь и устройство всегда кидали в море с подветренной стороны судна.
|
Голландский лаг был способом рассчитать скорость судна, походившего мимо объекта, |
|
Скорость=
2(Дистанция в метрах)
(время в секундах)
|
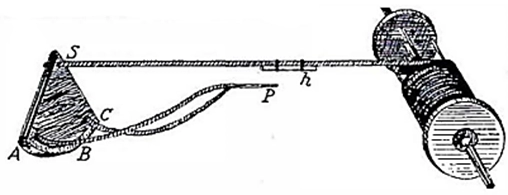
Рывок на линии бруска привел к отсоединению клина P от втулки "h". Это позволяло треугольному фрагменту занимать ориентацию параллельную потоку воды для облегчения вытягивания
Гидроакустический лаг передает звуковые импульсы от двух датчиков, расположенных на некотором расстоянии друг от друга в носовой и кормовой частях судна. После передачи импульса датчики переходят в режим приема. Полученные импульсы используются для создания профиля морского дна. Сопоставление двух профилей дает временную задержку. Затем скорость судна рассчитывается с учетом расстояния, разделяющего датчики.
Поскольку датчики направлены вертикально вниз, сигналы слабо чувствительны к движению судна, температуре и солености. Возможны два режима измерения: либо скорость относительно воды вблизи корпуса (водный след), либо скорость относительно морского дна (донный след).
Лаг также может измерять движение судна в режиме датчика. Если датчик подключен к гироскопу скорости и введено расстояние от датчика до носа и кормы, то скорость поперечного перемещения на носу и корме можно измерить с помощью только одного датчика.
Он также может работать как эхолот для определения глубины.
 Сенсор SAL log
Сенсор SAL log

Отображение лага SAL. Он может показывать: скорость по воде, скорость по земле и скорость корабля на датчике. BT = нижняя дорожка
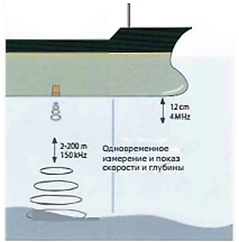
Лаг SAL измеряет STW вблизи корпуса с использованием 4 МГц и SOG с использованием 150 кГц до дна
Источники ошибок
На малых скоростях и малых глубинах временная задержка может быть больше, чем длина сигнала. В этих условиях необходимо использовать методы статистической обработки сигналов, что в некоторой степени снижает точность.
Принцип электромагнитного лага (EM log) заключается в том, что разность потенциалов будет индуцироваться в проводнике, когда он перемещается в магнитном поле. Датчик электромагнитного лага содержит катушку, которая создает магнитное поле. На корпусе датчика есть две точки соприкосновения с морской водой. Вода между точками контакта действует как проводник, и когда судно движется вперед, в воде вокруг датчика создается разность потенциалов.
Электромагнитные лаги показывают скорость в воде с точностью около 0,1 узла. Однако важно, чтобы датчик содержался в чистоте и располагался в зоне, свободной от турбулентности.
Датчики доступны в двухосной компоновке и они также сохраняют скорость движения судна.
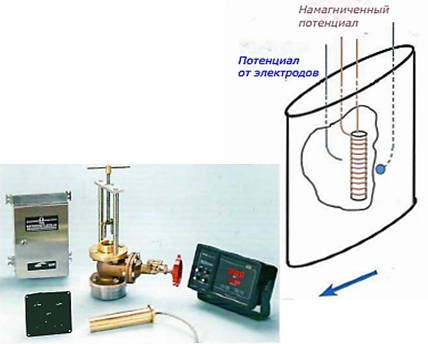
Электромагнитный журнал имеет те преимущества, что на него не влияют изменения глубины и солености, и он не имеет движущихся частей. Кроме того, связь между сигналом датчика и скоростью является линейной, что означает, что чувствительность одинаково хороша на всех скоростях.
В нем используется эффект Доплера, основанном на изменение частоты сигнала, воспринимаемого приемником, движение которого, изменяется относительно передатчика сигнала. Доплеровский лаг передает сигналы, отраженные от морского дна обратно в приемник. Для обеспечения отражения скорости над землей, глубина должна быть меньше максимальной глубины (200−500 метров). На больших глубинах лаг измеряет сигналы, отраженные от глубоководных слоев, и в этом случае регистрируемая скорость является скоростью прохождения относительно воды.
Одноосный доплеровский лаг измеряет только продольную составляющую скорости над землей. Доплеровские лаги с двумя осями также измеряют его поперечную составляющую.
Доплеровские лаги имеют конфигурации с одним или четырьмя направлениями передачи. Четыре передаваемых сигнала позволяют измерять поперечную скорость судна

Когда информация из доплеровского лага подключена к сети, могут отображаться и другие навигационные параметры
Источники ошибок
Датчик должен быть сконструирован таким образом, чтобы исключить влияние изменений солености и температуры воды.
Донные отложения дают отражения разного качества. Слежавшийся песок − самое лучшее, а ил − самое плохое.
Изменения крена и дифферента могут повлиять на точность. Различные производители предлагают индивидуальные решения для этих эффектов.
Одноосные установки могут серьезно пострадать от качки. Двухосевые системы позволяют ошибкам, возникающим в результате таких ситуаций, по компенсировать друг друга.
Сигнал может быть ослаблен из-за неправильной установки в воде, при отражении от дна. Когда окружающий шум становится больше отраженного сигнала, датчик перестает измерить частоту обнаруженного сигнала.

Можно получить информацию о скорости из специальной таблицы, где ее значения измерены в отношении к оборотам в минуту.
Это не позволяет осуществлять точную навигацию, но хорошо для контроля скорости в районах с ее ограничениями и для приблизительных оценок DR и ETA.
Скорость, измеренная таким образом, определяется в зависимости от нескольких факторов:
- План
- Уровень заиливания дна
- Качка, которая ведет к снижению скорости.

Небольшие суда часто оснащаются лагом, соединенным с небольшим гребным валом в качестве датчика. Эти датчики чувствительны к загрязнению, но обычно они легко чистятся.
Вертушечный лаг может показывать:
- Скорость по воде
- Проход от точки
- Пройденный путь
- Средняя скорость, максимальная скорость и их тенденция (увеличение или уменьшение).
Их можно настроить так, чтобы они показывали скорость в узлах, морских милях в час и т. д.

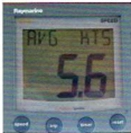 Лаг показывает пройденный путь и среднюю скорость
Лаг показывает пройденный путь и среднюю скорость
В лагах также могут отображаться неправильные значения, поскольку нулевая отметка неточно установлена. Кроме того, есть ошибки, зависящие от скорости.
Точность двухосного доплеровского лага при измерении до дна, составляет 0,2−1 узел, в зависимости от производителя. При измерении на воде точность, как правило, ниже, что вызвано турбулентностью на дне судна, особенно в более мелкой воде.
Лаги калибруются по отношению к точной скорости или точному расстоянию. Корректная скорость может быть рассчитана на известном отрезке при условии плавного движении с равномерной скоростью или определяется на основании данных GPS приемника при условии отсутствия течения.
|
STW рассчитывается = (Dx3600)/т в секундах
Коэффициент коррекции лага = STW/отображаемая скорость |
Чтобы устранить влияние любого течения, которое может присутствовать, расстояние измеряется в обоих направлениях и рассчитывается среднее значение двух проходов. Эффект течения пропадет.
Доплеровские и корреляционные лаги измеряют скорость по отношению к морскому дну при условии, что глубина не слишком велика, поэтому эффект течения отсутствует.
У электронных лагов есть настройка калибровки в своих меню.
Коэффициент лага рассчитывается следующим образом:
На этом проход лага показал 7,8 узла. Коэффициент лага = STW/скорость по лагу = 8,11/7,8 = 1,04 Скорость по лагу, умноженная на коэффициент лага, дает STW = 1,04 х 7,8 = 8,11 узлов.
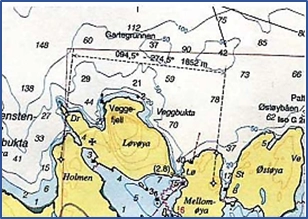 Точная миля в Осло-фьорде
Точная миля в Осло-фьорде
Чтобы получить STW, считайте данные лага и умножьте значение на коэффициент лага.
Для более полного оценки ошибки лага рекомендуется выполнить эту процедуру на нескольких скоростях. Некоторые электронные лаги могут хранить в своей памяти до четырех коэффициентов лага для разных скоростей.
Существует несколько возможных способов калибровки электронных лагов.
- Лаг настроен так, чтобы показывать тот же SOG, что и STW, считываемый навигационной системой. Это предполагает, что течение отсутствует.
- Введите коэффициент лога. Некоторые из них могут хранить коэффициенты для разных скоростей.
- Заплыв вперед и назад на известное расстояние. Путь заносится в журнал и навигатор отмечает, когда начинается измерение. Исходя из этого, лаг может рассчитать поправочный коэффициент.
Требования к точности IMO:
- Погрешности в показываемой скорости, когда судно идет без воздействия мелководья, ветра, течения и прилива, не должны превышать 2 % от скорости или 0,2 узла, в зависимости от того большей причины.
- Ошибки в указанном проходе, когда судно работает без внешних факторов, не должны превышать 2 % от прохода судна за 1 час или 0,2 морских мили в каждый час, в зависимости от того, что больше.
- Если на точность приборов, указывающих скорость и пройденное расстояние, могут повлиять некоторые условия (например состояние моря, температура воды, соленость, скорость звука в воде, глубина воды под килем, крен и дифферент судна), подробная информация о возможных последствиях, должна быть включена в руководство по оборудованию.
- Производительность приборов должна соответствовать требованиям стандартов: при качке судна, до ±10° и килевой качке, до ±5°.
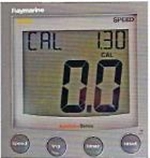
Электронный вход в настройки калибровки. При вводе параметра коэффициента лага будут показаны более точные значения
 Лаг SAL настраивается для калибровки за несколько проходов
Лаг SAL настраивается для калибровки за несколько проходов