 +7 (812) 4-673-673
+7 (812) 4-673-673
Классификация судов, оснащенных системами динамического позиционирования
Интенсивная промышленная добыча углеводородсодержащего сырья в прибрежных зонах морских государств за прошедшие несколько десятилетий привела к существенному снижению уровня этой добычи. Дальнейшие ее перспективы в настоящее время связывают с освоением шельфовых районов Арктики. Приоритетными для этой задачи являются суда и платформы, оснащенные системами динамического позиционирования (ДП) и удерживаемые в заданной точке при помощи подруливающих устройств, без использования якорей (Захаров, 1995). Классификация работ под класс судов, оснащенных системами ДП, в России не приводится ни в документах Российского Морского Регистра Судоходства, ни в Правилах классификации, постройки и оборудования плавучих буровых установок (ПБУ) и морских стационарных платформ, ни в каких-либо других российских нормативных документах. Не были исследованы и классифицированы также системы ориентации, предназначенные для работы в северных широтах. Решению этих проблем и посвящена данная статья
Классификация судов с системами ДП
В публикации ИМО (Международная морская организация) "MSC/Circ.645, Руководящие принципы для судов с динамическими системами позиционирования", выработаны правила для классификации систем динамического позиционирования судов как класса 1, класса 2 и класса 3.
- Система динамического позиционирования класса 1 не имеет избыточности. Потеря позиции может произойти при единичном отказе.
- Система динамического позиционирования класса 2 имеет избыточность, единичный сбой в активной системе ДП не приведет к отказу. Потеря позиции не должна происходить по вине одного из активных компонентов или систем, таких как генератор, двигатель, коммутатор, дистанционно управляемые клапаны и т.д. Но может возникнуть после отказа от статических компонентов, таких как кабели, трубы, клапаны и т.д.
- Система динамического позиционирования класса 3 обеспечивает удержание объекта над точкой позиционирования при единичном отказе активных и пассивных элементов, находящихся в любом из водонепроницаемых отсеков и противопожарных зон, в результате затопления, пожара или взрыва.
Таблица
|
Описание |
Класс оборудования СДП |
|||||
|
ИМО |
LR |
DnV |
GL |
ABS |
РМРС |
|
|
Ручное управление положением и автоматическое управление курсом при определенных максимальных погодных условиях |
— |
DP(CM) |
DYNPOS-AUTS |
— |
— |
— |
|
Автоматическое и ручное управление местоположением и курсом при определенных максимальных погодных условиях |
Класс 1 |
DP(AM) |
DYNPOS- AUT |
DP 1 |
DPS-0, DPS-1 |
ДИНПОЗ- 1 |
|
Автоматическое и ручное управление местоположением и курсом, при максимальных погодных условиях, во время и после единичного отказа в любом активном элементе |
Класс 2 |
DP(AA) |
DYNPOS- AUTR |
DP 2 |
DPS-2 |
ДИНПОЗ- 2 |
|
Автоматическое и ручное управление местоположением и курсом, при максимальных погодных условиях, во время и после любого единичного отказа активных и пассивных элементов, находящихся в любом из водонепроницаемых отсеков в результате затопления или пожара (две независимые компьютерные системы должны быть разделены водонепроницаемыми или противопожарными переборками класса А-60) |
Класс 3 |
DP(AAA) |
DYNPOS- AUTRO |
DP 3 |
DPS-3 |
ДИНПОЗ- 3 |
В разделе 7.5 Правил классификации, постройки и оборудования плавучих буровых установок (ПБУ) и морских стационарных платформ (МСП) Российского Морского Регистра Судоходства (Конструкция систем динамического позиционирования, классы) дается определение системам динамического позиционирования. Системы ДП должны подразделяться на классы (Правила..., 2001; 2003):
- Система динамического позиционирования класса 1, соответствующая по своим характеристикам знаку ДИНПОЗ-1 в символе класса судна, является системой с минимальном резервированием. При этом потеря положения ПБУ над точкой может произойти при единичном отказе.
- Система динамического позиционирования класса 2, соответствующая по своим характеристикам знаку ДИНПОЗ-2 в символе класса судна, должна иметь резервирование, которое обеспечивает удержание ПБУ над точкой позиционирования при единичном отказе в любом активном элементе.
- Система динамического позиционирования класса 3, соответствующая по своим характеристикам знаку ДИНПОЗ-3 в символе класса судна, должна иметь резервирование, которое обеспечивает удержание ПБУ над точкой позиционирования при единичном отказе элементов, находящихся в разных водонепроницаемых отсеках либо в одном из водонепроницаемых отсеков, в результате затопления или пожара, или в любом из противопожарных зон в результате пожара или взрыва.
Классификационные общества имеют свои собственные обозначения классов (см. табл.).
ИМО предоставляет право самостоятельно решить оператору судна ДП и его клиенту, к какому классу операций относится предстоящая работа. Норвежский морской директорат (НПРО) предлагает, что класс должен быть использован в соответствии с риском операции. В руководящих принципах НПРО и комментарии № 28 определены четыре класса операций:
- Класс 0, в которых возможность потери позиции по удержанию не рассматривается как угроза для человеческой жизни или причинению ущерба.
- Класс 1, в которых потеря позиции по удержанию может привести к повреждению или загрязнению окружающей среды с малыми последствиями.
- Класс 2, где потеря позиции по удержанию может привести к травме персонала, загрязнению, повреждению или к большим экономическим последствиям.
- Класс 3, когда потеря позиций по удержанию может привести к смертельному исходу, или сильному загрязнению или ущербу, с очень крупными экономическими последствиями.
Основываясь на этом, тип судна определяется по каждой операции:
- Класс 1 судна с системой ДП должен быть использован во время операции, когда потеря позиции не ставит под угрозу человеческие жизни, наносит существенный ущерб или причиняет больше чем минимальное загрязнение окружающей среды.
- Класс 2 судна с системой ДП должен быть использован во время операции, когда потеря позиции может вызвать травмы персонала, загрязнение или повреждение с большими экономическими последствиями.
- Класс 3 судна с системой ДП должна быть использована во время операции, когда потеря позиций может привести к смертельным исходам, сильному загрязнению или повреждению с глобальными экономическими последствиями.
Таким образом, для отечественных морских подрядчиков необходимо выработать и руководствоваться отечественной классификацией работ (операций) на шельфе и определить, какой класс судна с системой ДП должен быть использован в соответствии с риском операции. Прототипом может служить вышеизложенная версия.
Под избыточностью (резервированием) системы ДП понимается дублирование или многократное резервирование ее элементов, при котором комплекс, состоящий из энергетической установки и пропульсивных механизмов с их индивидуальными системами управления, работает под управлением компьютерной системы таким образом, что выход из строя отдельных систем управления, выполнение задачи удержания ПБУ над точкой позиционирования.
Для некоторых операций резервирования не требуется, например, когда потеря позиции по удержанию не представляет угрозы для человеческой жизни или причинения ущерба, загрязнения окружающей среды с малыми последствиями. Эта операция, как правило, будет сделана в Классе 1.
Чтобы иметь достаточную избыточность, должно быть выбрано и подключено необходимое количество генераторов и движителей, тогда отказ одного из них не приведет к потере позиции. Этот выбор остается на усмотрение оператора ДП. Для судов класса 2 и 3 система ДП производит периодически анализ состояния системы и предоставляет оператору информацию об оптимальной избыточности. Оператор имеет возможность принять рекомендации системы либо принять свое собственное решение. Таким образом, СДП является экспертной системой для принятия оператором ДП адекватных решений в любой реальной ситуации. Для класса 3 судов используются три управляющих компьютера ДП, три гирокомпаса, три датчика качки и три датчика ветра. Если происходит единичный сбой, ставящий под угрозу резервирование, т.е. отказ движителя, генератора или системы ориентации, и это не может быть устранено немедленно, операцию следует остановить как можно быстрее.
Об избыточности ДП судна следует судить по результатам испытаний, которые проводятся перед каждой ответственной операцией, перед началом каждого проекта или в плановом порядке. Кроме того, выполняются ежегодные испытания ДП.
Структура систем ориентации ДП
Система ДП обеспечивает автоматическое управление курсом и позицией судна или платформы.

Рис. 1. Основной принцип системы управления "Альбатрос". Остальные системы имеют аналогичный принцип действия.
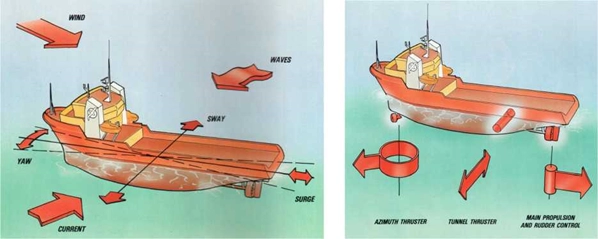
Рис. 2. Факторы, воздействующие на судно Рис. 3. Типы подруливающих устройств судов с ДП
Известно, что все суда и ППБУ подвергаются действию ветра, волн и течения. В систему ДП поступают данные, определяющие фактическую позицию и курс судна. Шумы отсеиваются с помощью техники фильтрации Калмана. В программное обеспечение компьютера входит математическая модель судна, имитирующая его динамику. Компьютер осуществляет проверку поступающих данных, отвергая при этом ложные или недостоверные сигналы. Результирующая оценка состояния судна или платформы обрабатывается оптимальным регулятором, который вырабатывает сигналы управления гребными винтами, подруливающими устройствами и рулями. В результате обеспечиваются максимальная способность стабилизации положения и минимальный расход топлива. Особо важно отметить высокую гибкость конфигурации системы ДП, благодаря которой можно выбрать любую комбинацию имеющихся сегодня на рынке систем ориентации.
Морское судно подвергается действию ветра, волн и течения (рис. 2). Скорость и направление ветра измеряются датчиком, а волнение и течение рассчитываются системой с помощью математической модели судна. Система ДП контролирует три степени свободы судна - ВДОЛЬ, ПОПЕРЕК и РЫСКАНИЕ. Перемещения измеряются гирокомпасом и системами ориентации. Данные потом корректируются на бортовую и килевую качку с помощью датчика вертикальной ориентации (ДВО).
На рис. 3 показаны наиболее распространенные типы подруливающих устройств. Упор обычно регулируется путем изменения частоты вращения или шага гребных винтов. Путем использования руля или насадки можно также иметь дополнительный боковой упор.
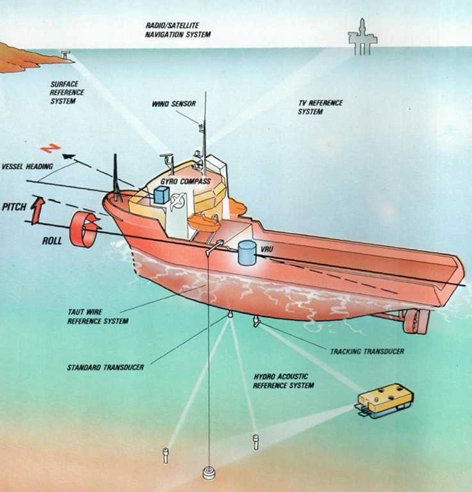
Рис. 4. Системы ориентации ДП
Наличие точных данных о позиции судна в любое время является необходимым условием эффективной работы системы ДП. На рис. 4 показаны распространенные системы ориентации, обеспечивающие точное определение места.
Исходная точка положения судна называется началом координат и определяется с помощью системы ориентации. Желаемая позиция судна задается оператором относительно начала координат, на определенном расстоянии по осям Север и Восток. Отклонения судна от выбранных оператором желаемых позиции и курса обнаруживаются системой ориентации и гирокомпасом, обеспечивающими подачу выходных сигналов на компьютер системы в соответствии с измеренным состоянием. Компьютеры системы обеспечивают автоматическую компенсацию воздействия бортовой и килевой качки на данные, поступающие от систем ориентации, путем калибровки измерениями ДВО. Практически все системы ориентации могут быть сопряжены с системой ДП. В Арктических широтах рекомендуется применять системы ориентации ДП, выполненные в ледовом классе. Они должны использовать данные от трех систем датчиков, классифицирующихся по минимальному составу навигационного оборудования следующим образом:
1. Системы определения географического местоположения судна
- судовая радиолокационная система (РЛС) 3 и 10 см диапазона;
- судовой радиотепловой локатор (РТЛ);
- импульснофазовая радионавигационная система (ИФРНС) Лоран-С;
- спутниковая радионавигационная система ГЛОНАСС, GPS;
- система EUROFIX.
2. Системы точного определения позиции судна (должны отличаться по принципам действия)
- гидроакустические;
- системы тугонатянутого троса;
- гиперболические разностно-дальномерные радионавигационные системы;
- лазерные системы.
3. Системы определения параметров возмущающего фактора на корпус судна
- курс;
- величину качки;
- скорости и направления ветра.
Например, для бурового судна типа "Валентин Шашин" будет использоваться согласно классификации следующий минимальный состав систем ориентации:
- гирокомпас - для определения курса судна;
- датчик ветра - для определения направления и силы ветра;
- датчик вертикальной ориентации - для измерения бортовой и килевой качки;
- датчик высоты волны - для определения величины амплитуды и направления волны;
- гидроакустическая система ориентации HPR309 - для определения позиции судна по расположению гидроакустических датчиков на дне моря (высокая точность 1-2 % от глубины воды);
- Taut Wire - для определения позиции по натяжению троса с грузом на дне моря и отклонению от вертикали;
- ARTEMIS - для определения позиции по расстоянию и угла поворота антенн береговой и находящейся на судне радиолокационных станций (точность 1 м на дистанции 600 м, 2 м на дальности 9 км);
- SYLEDIS - радиодальномерная РНС (точность ±3 м);
- PULS-8 - амплитудная РНС;
- GPS - спутниковая система навигации.
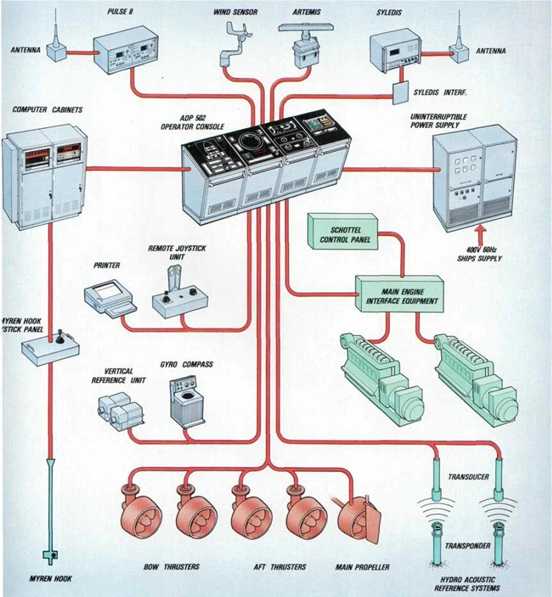
Рис. 5. АДП-503 бурового судна "Валентин Шашин" (Positioning..., 1985)
Выводы
Существующие правила национальных классификационных обществ классифицируют суда по классу системы ДП. Наивысший класс обеспечивает необходимое и достаточное резервирование, которое дает возможность справляться с отказом без потери позиций.
Навигационные системы и оборудование, т.е. системы ориентации, измерения которых используются при расчете управляющих воздействий, создаваемых СДП, согласно правилам классификационных обществ должны дублироваться и резервироваться. Об избыточности ДП судна следует судить по результатам испытаний, которые проводятся перед каждой ответственной операцией или в плановом порядке.
Требования к точности удержания судов при динамическом позиционировании определяются характером проводимых работ и могут изменяться в широких пределах - от десятков сантиметров до нескольких метров. Работы на шельфе требуют классификации под класс судна.
СДП использует измерения от разных навигационных систем ориентации: определения места судна, измерения курса, измерения положения корпуса судна и параметров качки, измерения для оценки внешних возмущений - вектора скоростей ветра и течения. Они требуют соответствующей классификации.
Литература
Positioning and control systems. Kongsberg, Kongsberg Albatross A.S., 1985.
"ИМО MSC/Circ.645, Руководящие принципы для судов с динамическими системами позиционирования". URL: Http://www.imo.org/includes/blastDataOnly.asp/data_id% 3D10015/MSCcirc645.pdf.
Захаров Е.В. Состояние и перспективы выявления ресурсов УВ на мелководных шельфах арктических морей. Технические решения для круглогодичного бурения разведочных и эксплуатационных скважин на мелководье арктических морей. М., ИРЦ РАО Газпром, с.3-10, 1995.
Правила классификации и постройки морских судов. В 2 т. СПб., Рос. мор. регистр судоходства, т.2, 619 с., 2003.
Правила классификации, постройки и оборудования плавучих буровых установок (ПБУ) и морских стационарных платформ (МСП). СПб., Рос. мор. регистр судоходства, 423 с., 2001.
Г.Г. Холодов