 +7 (812) 4-673-673
+7 (812) 4-673-673
Радарный оверлей
29.06.2015

В соответствии с Резолюцией ИМО MSC.282(86) с 2012 по 2018 годы все морские суда должны быть оснащены ЭКНИС системами, которые станут элементами интегрированной навигационной системы.
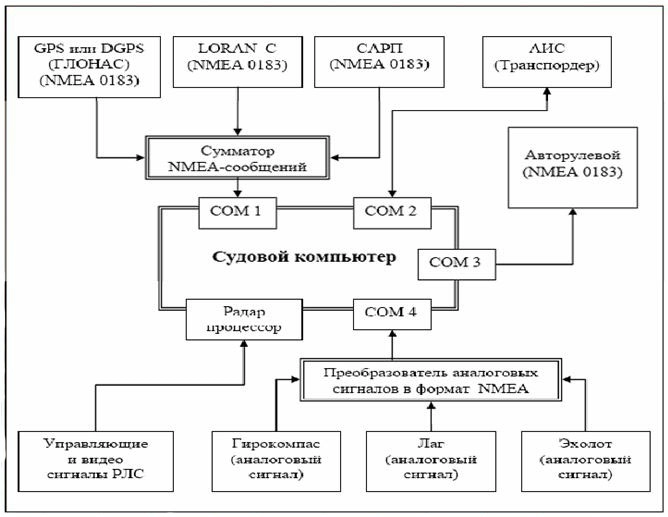
Основа ЭКС – это судовой компьютер. В качестве внешних навигационных устройств может подключаться: приемник ГНСС ( ГЛОНАСС, GPS), гирокомпас, магнитный и спутниковый компасы, лаг, эхолот, САРП, РЛС, транспондер АИС, авторулевой, СКДВП, датчик ветра. Неоспоримо, что такое представление информации удобно для судоводителя.
Однако, не все так просто. Со значимыми преимуществами, есть и значимые недостатки. При возникновении сбоев, необходимо уметь выявлять наличие ошибок, а это не возможно без понимания работы системы и наличия специальных средств. К таким средствам можно отнести режим наложения радиолокационного изображения (РЛИ) на карту – то есть «радарный оверлей». Иными словами, дублирование радара на фоне карты. Этот режим можно использовать в качестве средства диагностики безошибочности работы навигационного оборудования.
Существуют два типа сопряжения ЭКНИС с радаром: «цифровое NMEA- сопряжение» (если в радаре есть режим автоматического сопровождения целей, при котором возможно вводить в ЭКНИС данные о сопровождаемых радаром целях), подключение через радарный процессор ( преобразует сигналы радара в цифровую форму). А в результате мы получаем наложение РЛИ на карту.
Какие же изменения произойдут при наложении РЛИ на карту:
- вместо точки, которая обозначает местонахождение буя или вехи, на карте будет протяженная радиолокационная отметка (РЛО), которая во много превышает истинные размеры объекта. И это надо уметь правильно понимать, т.к. истинное положение будет строго посередине передней кромки РЛО.
- происходит расширению сигнала от береговой черты при ее облучении под острыми углами. Отображаемый сигнал от берега заходит на область воды, при наблюдении его на больших расстояниях, а по мере приближения, возвращается к своему истинному. Наиболее достоверная оценка береговой линии осуществляется при «перпендикулярном» по направлению к береговой линии облучении радаром при движении судна вдоль берега. Этот эффект есть и на самом радаре, однако не столь явно заметен.
- РЛИ от береговой черты не всегда соответствует реальной береговой черте (а значит и картографическому ее изображению). Это из-за того, что пологий берег плохо отражает РЛС и часто не виден на радаре, а эффективное отражение происходит от крутых склонов или крупных береговых объектов, которые за береговой чертой.
К каким ошибкам это все может привести?
- картографическим, т.е. никогда нельзя абсолютно доверять тем данным, которые представлены на карте. В режиме радарного оверлея подобные расхождения и ошибки можно заметить через несоответствие картографической и оверлейной береговой линий. Но при этом надо учитывать все особенности отображения РЛС от берега, описанные выше.
- ошибкам системы позиционирования. В определении координат с помощью GPS (или ГЛОНАСС) также возможны сбои и преднамеренные ошибки, которые могут достигать сотен метров. При использовании ГНСС с дифференциальным режимом работы, анализ данных эхолота и их сопоставление с картой глубин, периодическое определение места судна известными стандартными способами возможно определять эти ошибки. Но, самым эффективным является режим радарного оверлея. Очень важно, чтобы радар видел береговую черту, и если она не соответствует картографической и имеет смешение в одном направлении на фиксированную величину, значит возникли ошибки в ГНСС.
- смещение радиолокационного сигнала относительно картографического вследствие недостоверности пересчета местных эллипсоидов. В этом случае РЛИ такого участка будет иметь постоянное смещение в одном направлении.
- сбои в работе курсоуказателя могут привести к неправильным данным о курсе судна, неправильной оценке пеленгов на наблюдаемые цели, неправильной оценке навигационной опасности и ошибочном принятии решения на расхождение с целью. А выявить эти ошибки поможет радарный оверлей. Радар изначально определяет направления относительно диаметральной плоскости судна, а затем осуществляется пересчет курсовых углов радиолокационных объектов в пеленга, путем прибавления к ним текущего значения курса. Полученный РЛС накладывается на карту. В случае, если значение курса судна будет иметь ошибку, то на величину этой ошибки исказится все РЛИ. Оно будет повернуто вокруг места судна на величину ошибки курса и это будет легко идентифицироваться по характерному несовпадению картографической и радиолокационной береговой черты.
- данные от АИС тоже можно проверить с помощью радарного оверлея. При правильной ее работе отметка от АИС цели совпадает с радиолокационной по углу и дистанции. Этот же принцип относится и к контролю информации о целях, поступающей с САРП.
Можно с большой уверенностью сказать, что режим радарного оверлея очень полезен, ведь благодаря ему можно оперативно контролировать работу системы и данных, которые поступают с других систем.